First Prototype¶
Published on 2016-03-11 in Tote HaD.
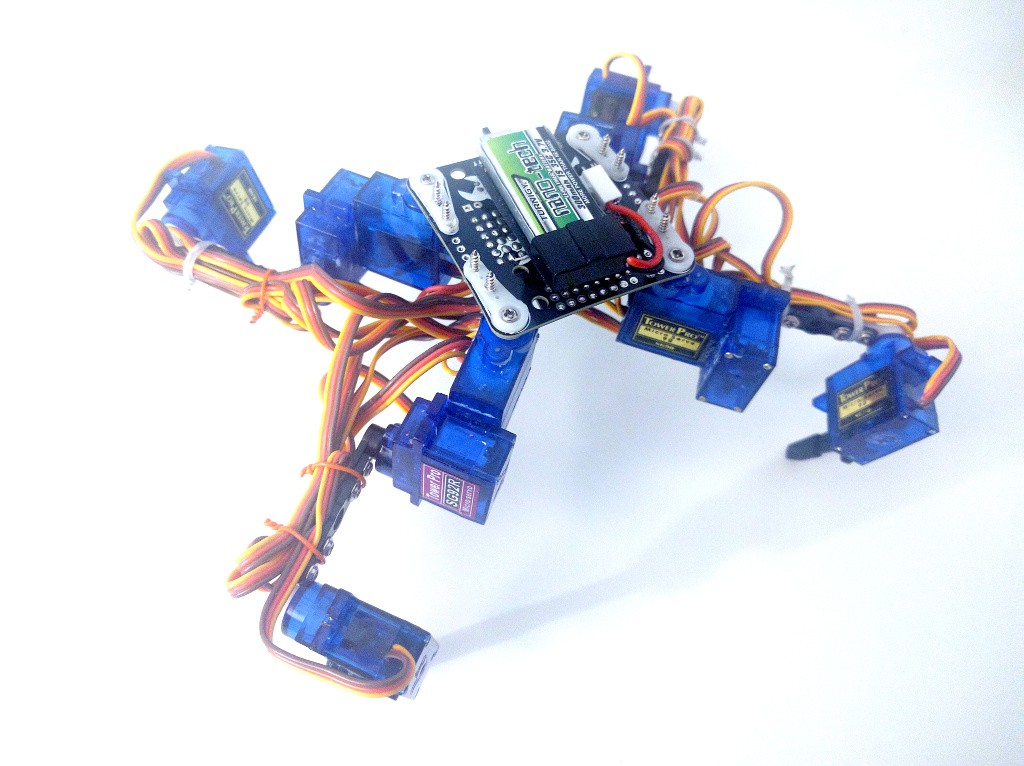
The prototype unit is more or less ready. In the end I took the legs from one of my other Totes, so I have no step-by-step drawings. I will do rendered images instead – they should be much cleaner and easier to follow then too.
On the software side, I have the Arduino code that does leg inverse kinematics pretty much ready (just need some trimming for the servos positions), and a basic Python code for the ESP8266:
from machine import I2C, Pin
import ustruct
class Robot:
I2C_ADDRESS = 0x09
def __init__(self):
self.i2c = I2C(sda=Pin(0), scl=Pin(2))
def leg_move_to(self, leg, x, y, z):
data = ustruct.pack("Bbbbb", 4 * leg, 1, x, y, z)
while True:
try:
self.i2c.writeto(self.I2C_ADDRESS, data)
except OSError:
pass
else:
break
This lets you move each of the legs to any position. So far so good. Next I will try to actually make it walk, but I doubt I will have any time for that in the following week, which is full of travelling for me.