Prototyping and Controller Code¶
Published on 2016-03-06 in Tote HaD.
With the addition of ESP8266, Tote will now have two processors on board, and it makes sense to split the responsibilities for them a little bit. The ATmega328p on the Pro Mini is relatively slow (8Mhz) and weak, but has a lot of inputs and outputs, which makes it perfect as the servo controller, and generally as the spinal cord of the robot, controlling low-level reflexes. The ESP8266 is much stronger and faster (it has to be to handle WiFi), and so it could handle higher-level functions.
Because the time is precious, I started to work on the code for the Pro Mini already. I made a prototype using one of the older boards, but with the new leg configuration, and with some cables for connecting the ESP8266 to it:
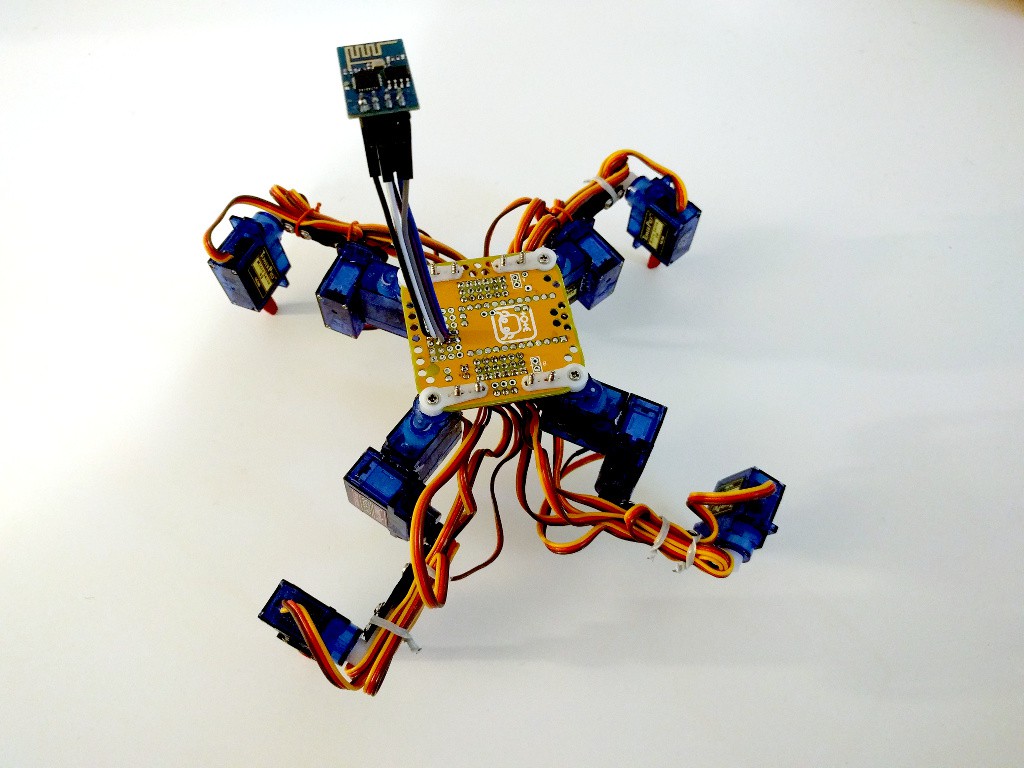
Now I’m copy-pasting bits and pieces of the original Tote code, and adding some I²C communication on top of that. Basically, the ESP8266 will be sending coordinates for the legs to the Pro Mini, and it will handle leg inverse kinematics.