Finished¶
Published on 2016-04-17 in Mechatronic Ears.
So today I sat down and wrote all the code for the ears. This time I’m using a running average filter to smooth the signal from the accelerometer (because there wasn’t any room for capacitors). I also tried to have a drip integrator to measure “excitement” – just general speed of changes of acceleration – but that didn’t work too well and I went back to the original logic of the ears.
Here’s the size comparison of the current model and the initial prototype:
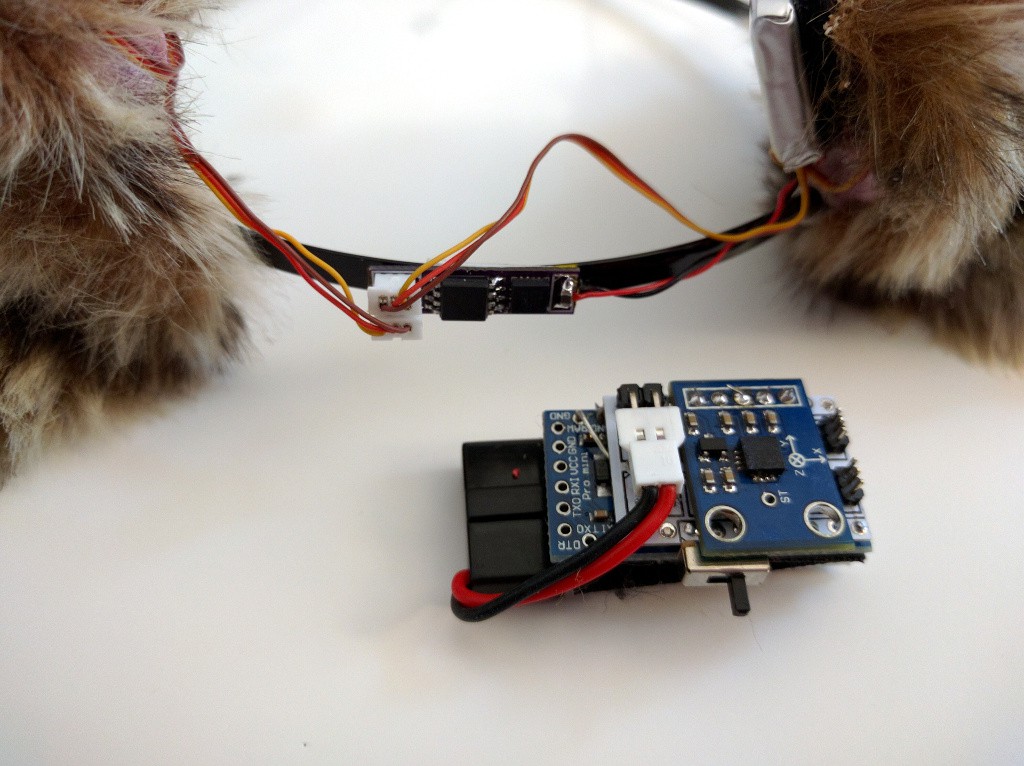
I guess I could make it smaller if I cut the servo plugs and solder the servos directly, but meh. The battery hides nicely under one of the ears. I should probably wrap the headband with some black tape, to hide the device and the wires, but for now I still want to have access to it.
Here’s the code I’m using (the commented out parts are for debugging serial on the servo pins):
//#include <SoftwareSerial.h>
//SoftwareSerial serial(1, 0);
void setup() {
servo_setup();
//serial.begin(9600);
}
void servo_setup() {
pinMode(0, OUTPUT);
pinMode(1, OUTPUT);
// Setup the PWM clock to ~62.5Hz for the servos.
TCCR0A = 2<<COM0A0 | 2<<COM0B0 | 3<<WGM00;
TCCR0B = 0<<WGM02 | 1<<CS00 | 1<<CS01 | 0<<CS02;
OCR0A = 0;
OCR0B = 0;
}
void update_servos(uint8_t left_position, uint8_t right_position) {
static uint8_t current_left = 0;
static uint8_t current_right = 0;
uint8_t left = 17 + min(left_position, 15);
if (current_left < left) {
++current_left;
OCR0A = current_left;
} else if (current_left > left) {
--current_left;
OCR0A = current_left;
} else {
OCR0A = 255;
}
uint8_t right = 33 - min(right_position, 15);
if (current_right < right) {
++current_right;
OCR0B = current_right;
} else if (current_right > right) {
--current_right;
OCR0B = current_right;
} else {
OCR0B = 255;
}
}
int running_average(int *buffer, uint8_t *cursor, int *total, int value) {
*total -= buffer[*cursor];
buffer[*cursor] = value;
*total += value;
*cursor = (*cursor + 1) & 0x0F;
return *total >> 4;
}
void loop() {
static uint8_t left = 7;
static uint8_t right = 7;
static int x_buffer[16] = {};
static int y_buffer[16] = {};
static int z_buffer[16] = {};
static uint8_t x_cursor = 0;
static uint8_t y_cursor = 0;
static uint8_t z_cursor = 0;
static int x_total = 0;
static int y_total = 0;
static int z_total = 0;
static int excitement = 0;
int z = running_average(x_buffer, &x_cursor, &x_total, analogRead(1) - 512 -16);
int y = running_average(y_buffer, &y_cursor, &y_total, analogRead(2) - 512);
int x = running_average(z_buffer, &z_cursor, &z_total, analogRead(3) - 512);
/*
serial.print(x);
serial.print(", ");
serial.print(y);
serial.print(", ");
serial.print(z);
serial.println();
*/
if (x > 20) {
left = 15;
right = 15;
} else if (x < - 20) {
left = 0;
right = 0;
} else if (y > 20) {
left = 15;
right = 0;
} else if (y < -20) {
left = 0;
right = 15;
} else {
left = 7;
right = 7;
}
update_servos(left, right);
delay(60);
}
And that’s it for this project. Works as intended.
In the future, I might try and make a hat with ears, using larger servos and putting everything inside the hat.