Mechatronic Ears¶
Wearable cat ears that move



Ears that move as you move your head.
Logs¶
2017-09-12 - Maker Faire
2016-11-26 - Shrinking
2016-11-25 - Make it Fit in 1kB
2016-04-17 - Servos Hate Grease
2016-04-17 - Finished
2016-04-16 - Assembled, Programming
2016-03-21 - Hot Plate Soldering
2016-03-09 - PCBs Arrived
2016-02-23 - PWM on ATtiny85
2016-02-21 - Miniaturization
2016-02-20 - Source Code
2016-02-20 - Movement Test
2016-02-20 - Installing Servomechanisms
2016-02-20 - First Prototype Working
Components¶
Component |
Count |
Notes |
|---|---|---|
Cat Ears |
1 |
Preferably synthetic |
Sub-micro servo |
2 |
|
Arduino Pro Mini 3.3V |
1 |
|
1S LiPo Battery |
1 |
|
GY-61 Accelerometer Module |
1 |
Instructions¶
Connect the servos and the battery, and tape the PCB at the top of the headband.
Solder the servo plugs and the power plug normally.
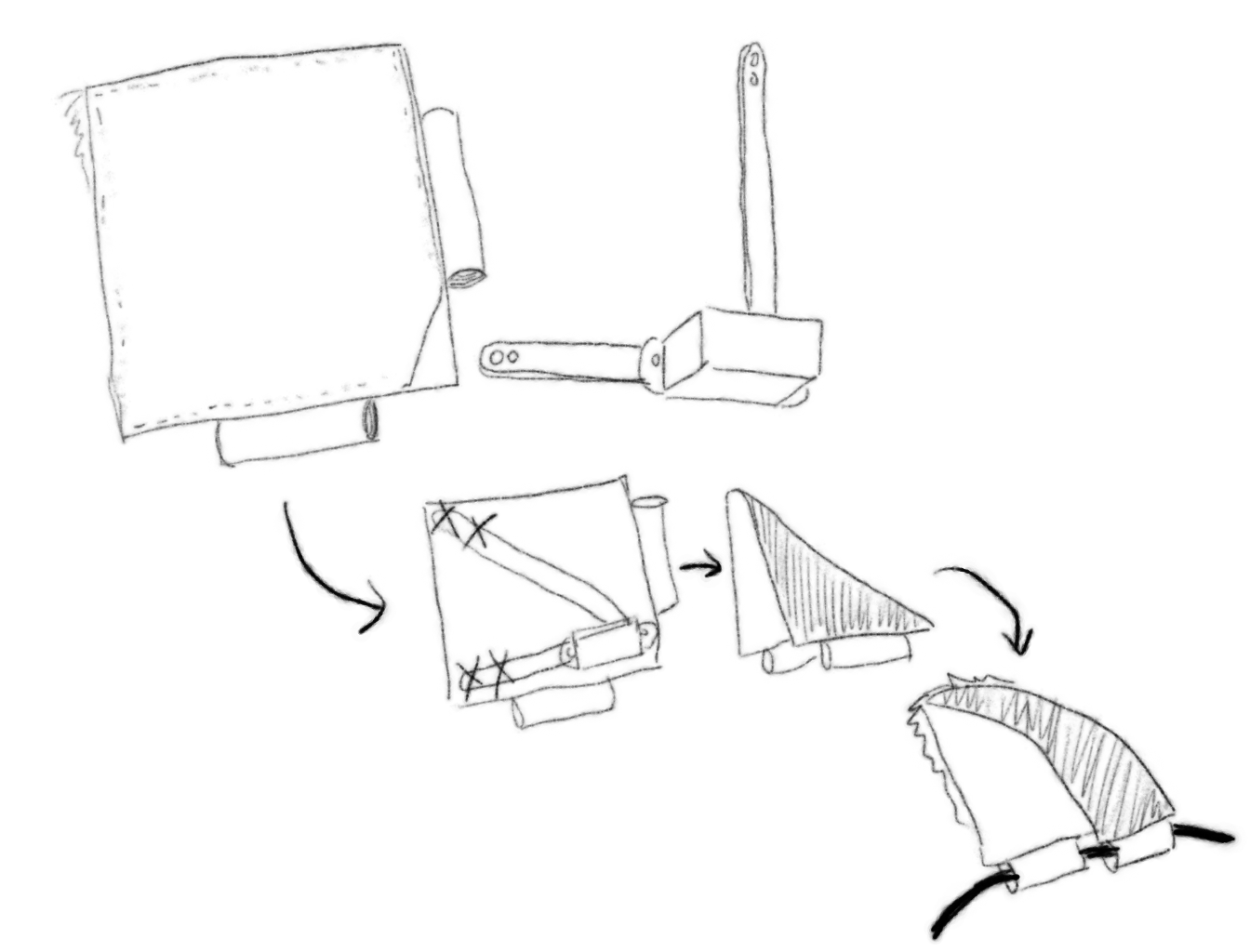
Attach the horns to the servos using screws and glue, and put them inside the ears according to this diagram:

Program the ATtiny85 using a programming clip and an ISP programmer. The code is at: https://bitbucket.org/thesheep/ears/src and you can either use the Arduino IDE to flash ears.ino, or enter the “main” directory and run “make flash”.
Get the PCB from https://oshpark.com/shared_projects/JQpvX13E \
You can also take the Fritzing file from the repository, generate Gerber files and order it somewhere else, or even make the PCB yourself.
Apply the solder paste, place the ATtiny85, capacitor and the accelerometer, and heat carefully with a heat gun or a reflow oven.