Servo Blaster¶
Published on 2016-01-07 in Tote Zero.
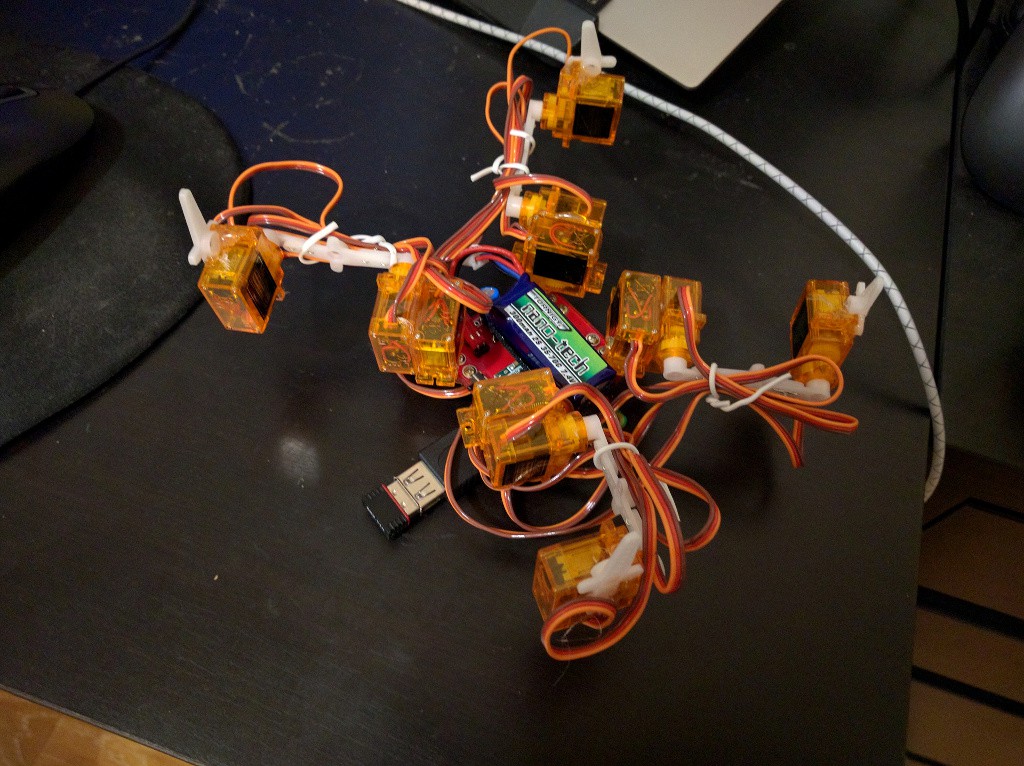
So I have the robot assembled pretty much the way I wanted – the PCB as the body, a XM1584-based voltage regulator for steady 5V to the Pi and to servos, capacitor, power switch, 2S LiPo battery. Nothing fancy, really. I have no voltage monitoring this time, because the Pi doesn’t have an ADC that I could use (I might add one in the future versions), so I have to be careful about the battery use.
I also have the Servo Blaster , the daemon I’m using to generate PWM signal for the servos, all installed and configured, and I have a simple Python class to use it:
import math
class Servo(object):
def __init__(self, servos, index, reverse=False, trim=0):
self.servos = servos
self.index = index
self.reverse = reverse
self.trim = trim
def move(self, radians=None, degrees=None):
self.servos.move(self.index, radians, degrees, self.reverse, self.trim)
class Servos(object):
min_pos = 600
max_pos = 2400
unit = 4 # us
max_servos = 12
pos_range = 180
def __init__(self):
self.device = open('/dev/servoblaster', 'w')
def __getitem__(self, index):
return Servo(self, index)
def move(self, servo, radians=None, degrees=None, reverse=False, trim=0):
if degrees is None:
degrees = math.degrees(radians)
degrees += trim
if reverse:
degrees = self.pos_range - degrees
position = self.min_pos + (degrees * self.pos_range /
(self.max_pos - self.min_pos))
position = min(self.max_pos, max(self.min_pos, position))
output = position / self.unit
self.device.write("{}={}\n".format(servo, output))
def update(self):
pass
Now it’s time for my favorite pastime (not): figuring out the order, orientation and trims for all the servos. Once I have that, I expect my code for the PyBoard to basically work – which means that I should have the basic creep gait. For now, I can move each of the servos individually, while the robot lies on its back, with a wifi dongle connected for control:
\