Tote Zero¶
Affordable quadruped robot powered by a Pi Zero
The original Tote used an Arduino Pro Mini clone for its brains, as this was the most affordable option available at the time, and reasonably easy to use and program. But now that there is a $5 single-board computer available, why not use it instead?
The advantages, as I see them, are three-fold:
using Python for programming, which makes it much easier to both write code and test stuff in the interactive console,
possibly integrating this with ROS, OpenCV and other awesome tools,
much more computing power, which means that more interesting things can happen.
Logs¶
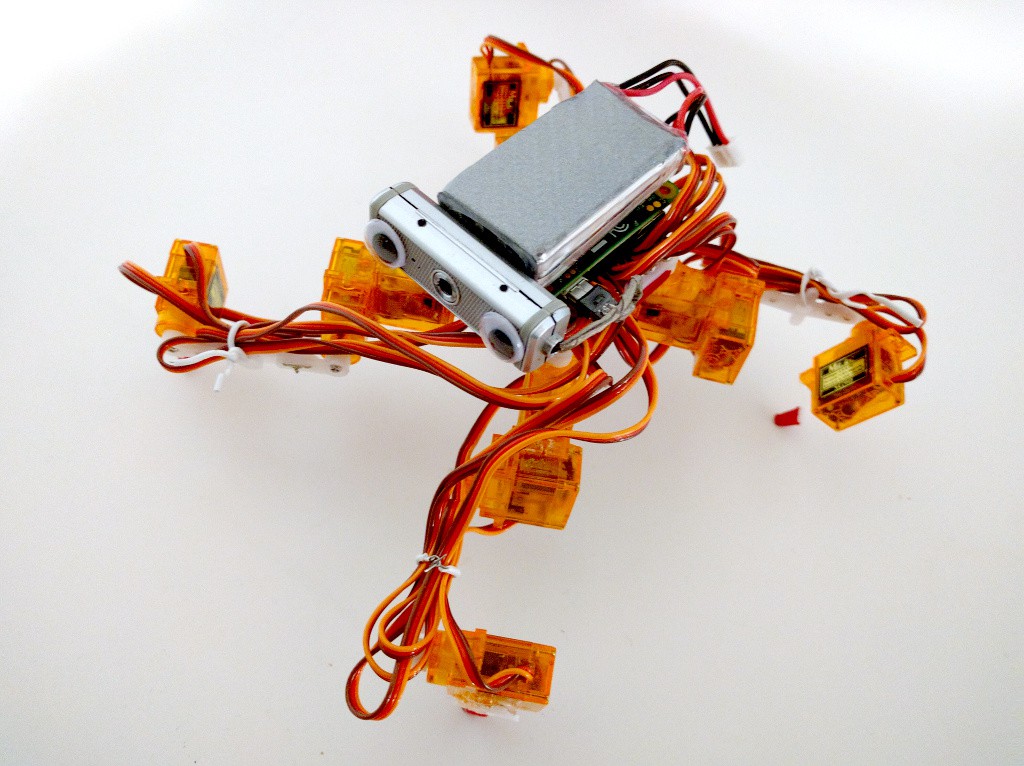
2016-11-06 - Robot Fusion
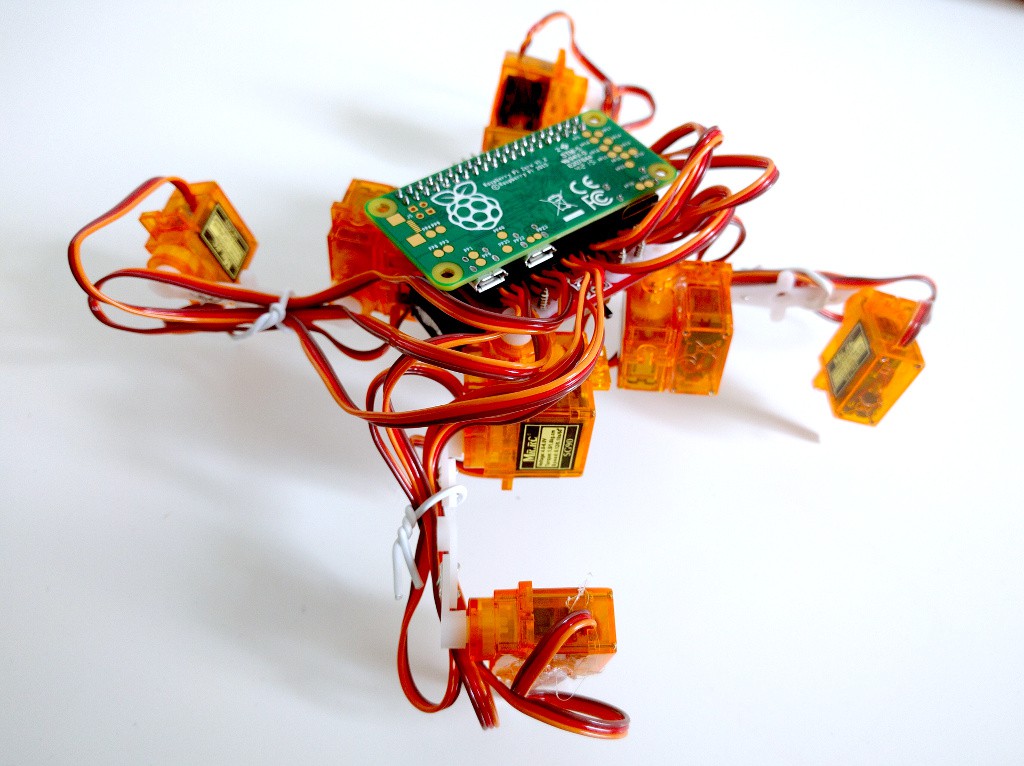
2016-02-11 - Everything in One?
2016-02-07 - Face
2016-02-07 - Camera
2016-01-27 - First Walk
2016-01-26 - One Step Forward, Two Steps Back
2016-01-25 - Single-port USB Hub
2016-01-07 - Servo Blaster
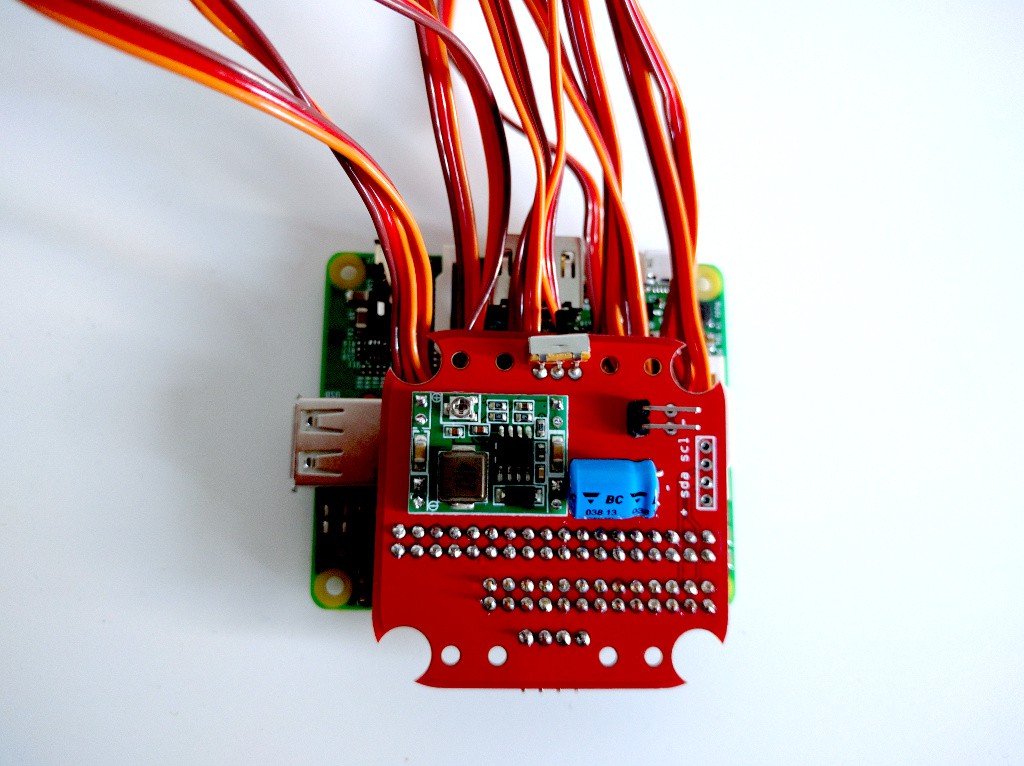
2016-01-07 - Fixed Board
2016-01-05 - Off By One Servo Plug
Links¶
Components¶
Component |
Count |
Notes |
|---|---|---|
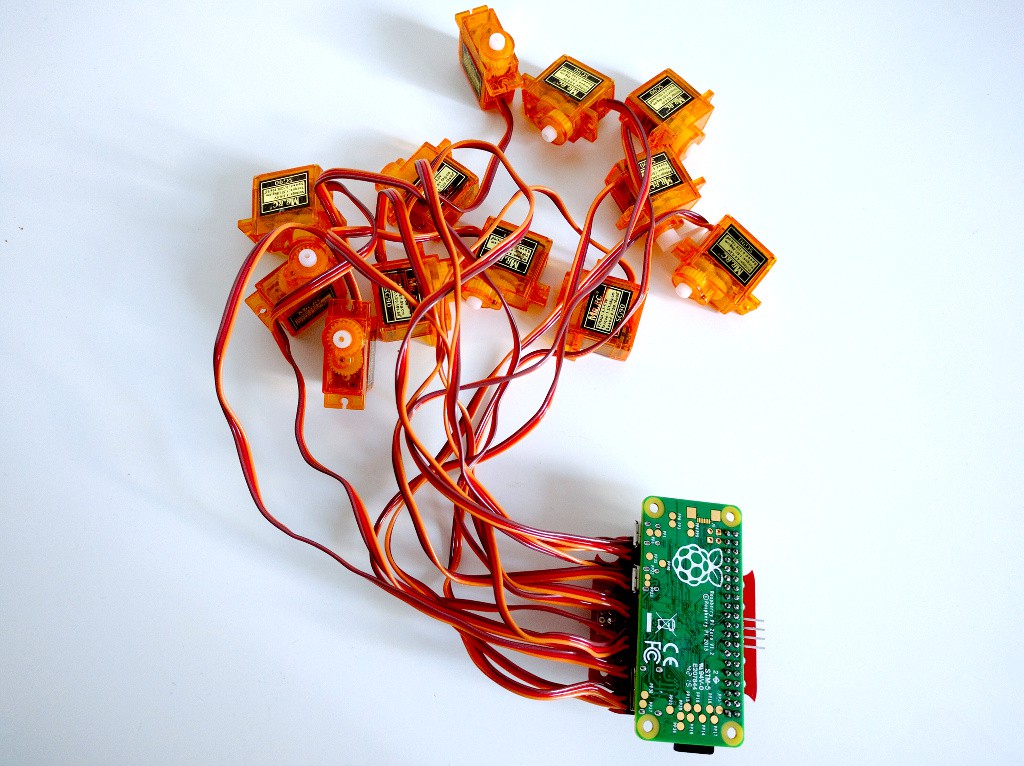
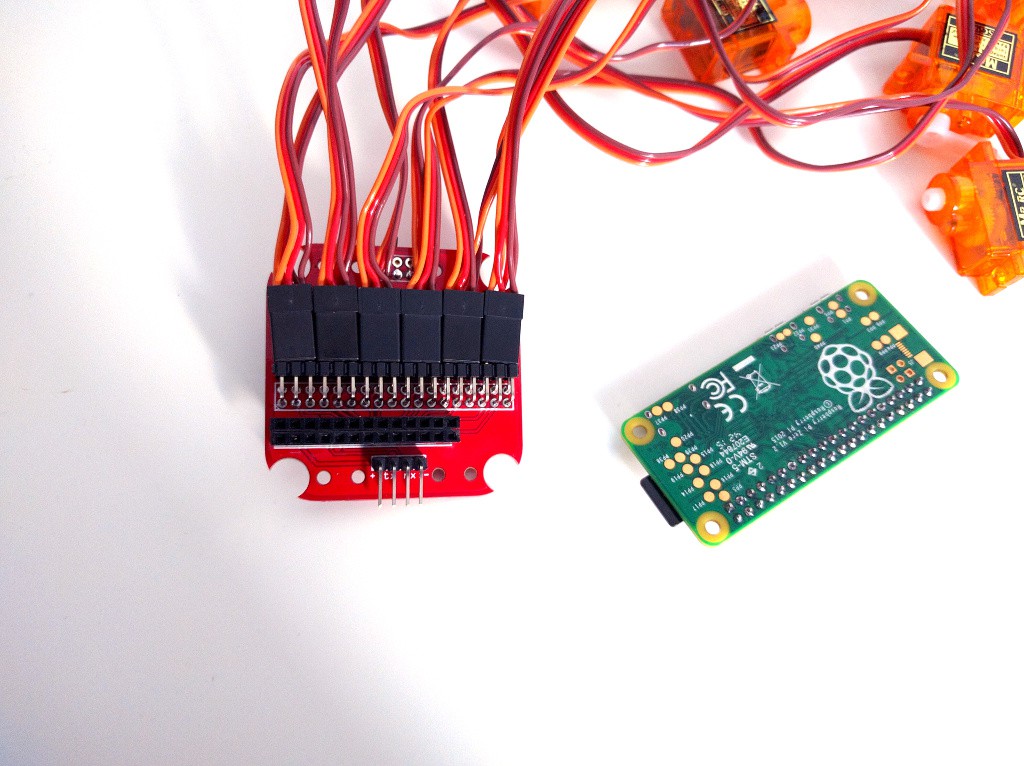
Raspberry Pi Zero |
1 |
A+ works too |
SG90 Microservo |
12 |
Or any other model of a small, 9g microservo |
Custom Printed Circuit Board |
1 |
|
XM1584-based Switching Voltage Regulator Module |
1 |
|
2S 300mAh LiPo Battery |
1 |
Or any other 2S LiPo |
Pin Headers |
2 |
One double-row angled male, and one female |
USB Camera Module |
1 |
Here I used a camera from Asus F5N, other would work too |
Instructions¶
For mechanical assembly, follow the instructions for Tote at http://tote.readthedocs.org
The code repository at https://bitbucket.org/thesheep/tote0/src contains all the files needed – copy them to the pi
Get ServoBlaster from https://github.com/richardghirst/PiBits/tree/master/ServoBlaster and compile it and install
Copy the ‘servoblaster’ startup script from the code repository to /etc/init.d and make it start at startup
Run the run.py program
PROFIT!!!