Wiring and Hands¶
Published on 2015-08-28 in Logicoma-kun.
I attached the PCB with the brains for this robot (I’m using one of the old PCBs I made for Tote ), and connected all the wires. Getting them to the right place was a little tricky, but making a few extra holes helped with that. The power switch is at the back, under the weapons box.
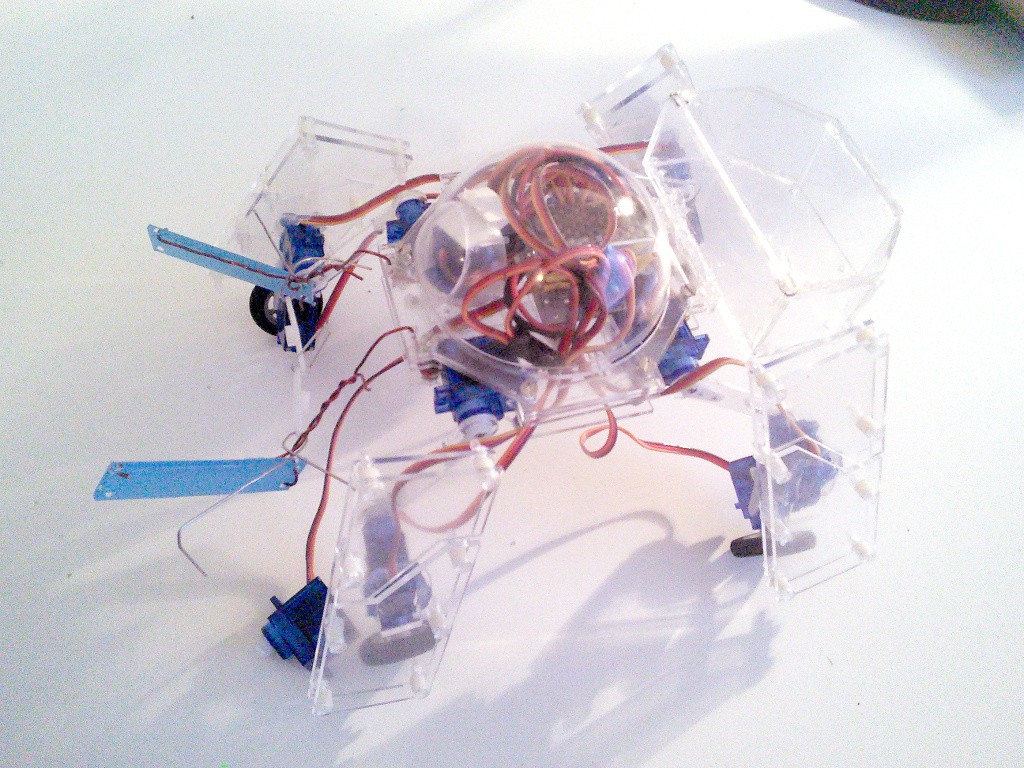
I’m also working on the hands (the two light-blue parts connected with copper wire), prototyping the mechanism for them. I need them to both move controlled with a single servo, that you can see on the photo. So far I came up with something like this:
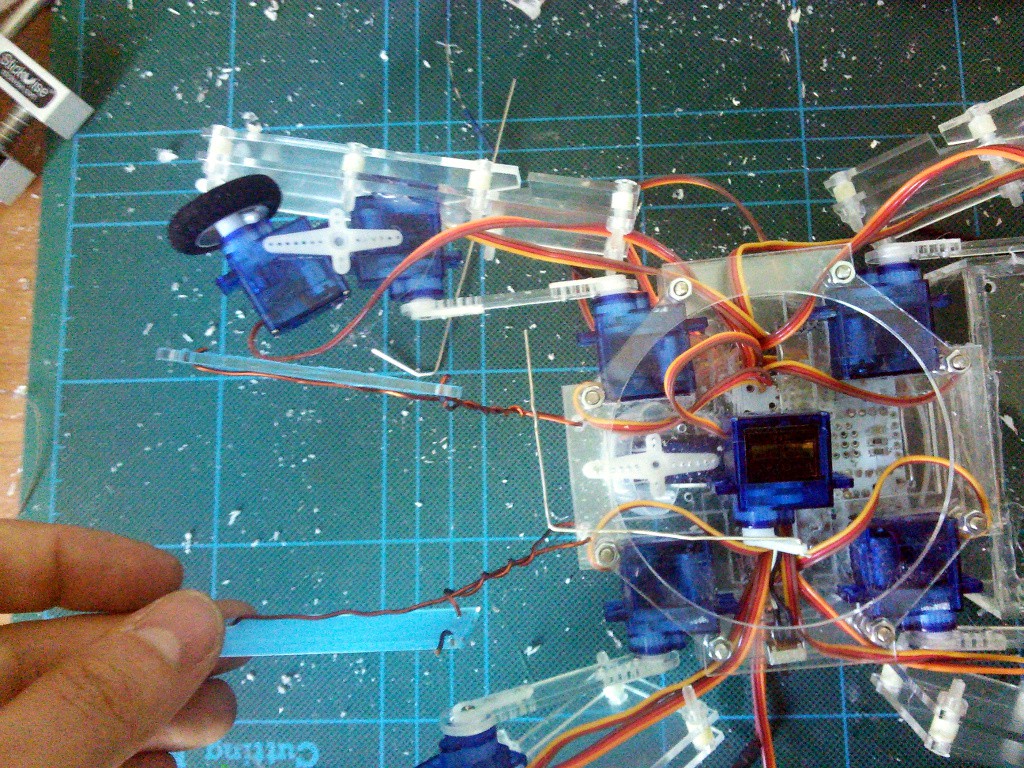
I’m still not happy with this design, I will keep on trying different things.
In other news, the breakout board for the distance sensor arrived, so I can try if it works and try to put it in the robot’s eye. More on that soon.