I²C Slave¶
Published on 2015-11-21 in Tote.
I have done a little bit of progress towards putting a Raspberry Pi on Tote. You see, I didn’t want to make it communicate over serial, because I’ve done that already with ESP8266 (see previous logs). This time I wanted something more ambitious, so I decided to use I²C. As the first step, I completely rebuilt one of my robot prototypes, to use the new PCB and to also leave the top side of the PCB as flat as possible – it only has the Pro Mini and the servo horns there, and all the rest is on the bottom side. I also added a voltage regulator giving a steady 5V, so that I can power the Raspberry Pi with it. The Pro Mini still uses only 3.3V, but it’s fine with 5V, as it has an internal regulator. Servos actually work better at 5V, as it’s within its parameters, unlike the 3.7V, which was a bit low. Finally, I replaced the 1S 3.7V LiPo battery with a 2S one, so that the regulator has something to drop from (the boost converters that I have all have a 500mA shutoff, so they are not suitable for powering 12 servos).
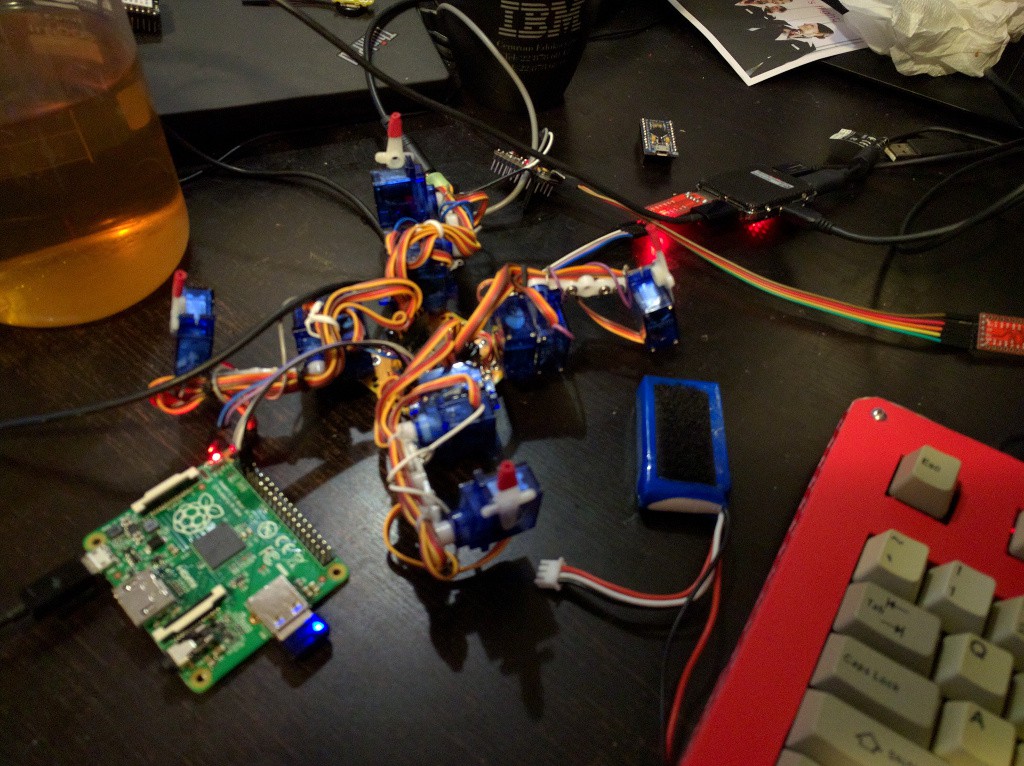
Next, I will need the code for the Pro Mini to act as a I²C slave, receive the positions and move the servos. For the moving servos part I just reused the servo.ino code I already had for Tote. For the I²C slave, I did something like this:
#include "servos.h"
#include <Wire.h>
const int SLAVE_ADDRESS = 0x04;
void setup() {
Wire.begin(SLAVE_ADDRESS);
Wire.onReceive(receiveEvent);
servo_setup();
}
void loop() {
delay(100);
}
void receiveEvent(int bytes) {
union {
byte bytes[4];
float value;
} float2bytes;
unsigned int servo = Wire.read() | Wire.read() << 8;
for (int j = 0; j < 4; ++j) {
if (!Wire.available()) { return; }
float2bytes.bytes[j] = Wire.read();
}
servo_move(servo, float2bytes.value);
}
Nothing fancy or complicated, but it gets the job done. One thing I could have done easier – I’m sending the positions as floats, because that’s what the functions I already had were accepting. I could have instead make them work in µs, as most servo controllers out there, and use simple integers. I might still switch to that, if it turns out to be too slow, but for now this is good enough.
Next, I wrote some Python code on the Raspberry Pi side, to test if I can actually move the servos:
import smbus
import struct
import math
bus = smbus.SMBus(1)
ADDRESS = 0x04
def servo_move(servo, radians=None, degrees=None):
if radians is None:
radians = math.radians(degrees)
bus.write_block_data(ADDRESS, servo,
[ord(b) for b in struct.pack('<f', radians)])
After some small tweaks, it works. By the way, funny how write_block_data requires a list of integers, not a string of bytes, as the struct.pack() produces. Oh well.Once I had that tested, it’s time to wrap it in a class and plug into my old Python gait code:
import smbus
import struct
import math
class Servo(object):
def __init__(self, servos, index):
self.servos = servos
self.index = index
def move(self, radians=None, degrees=None):
self.servos.move(self.index, radians, degrees)
class Servos(object):
def __init__(self, address=0x04, bus=1):
self.address = address
self.bus = smbus.SMBus(bus)
def __getitem__(self, index):
return Servo(self, index)
def move(self, servo, radians=None, degrees=None):
if radians is None:
radians = math.radians(degrees)
self.bus.write_block_data(self.address, servo,
[ord(b) for b in struct.pack('<f', radians)])
Then I assembled all the parts of the robot together, and it’s ready to start walking:
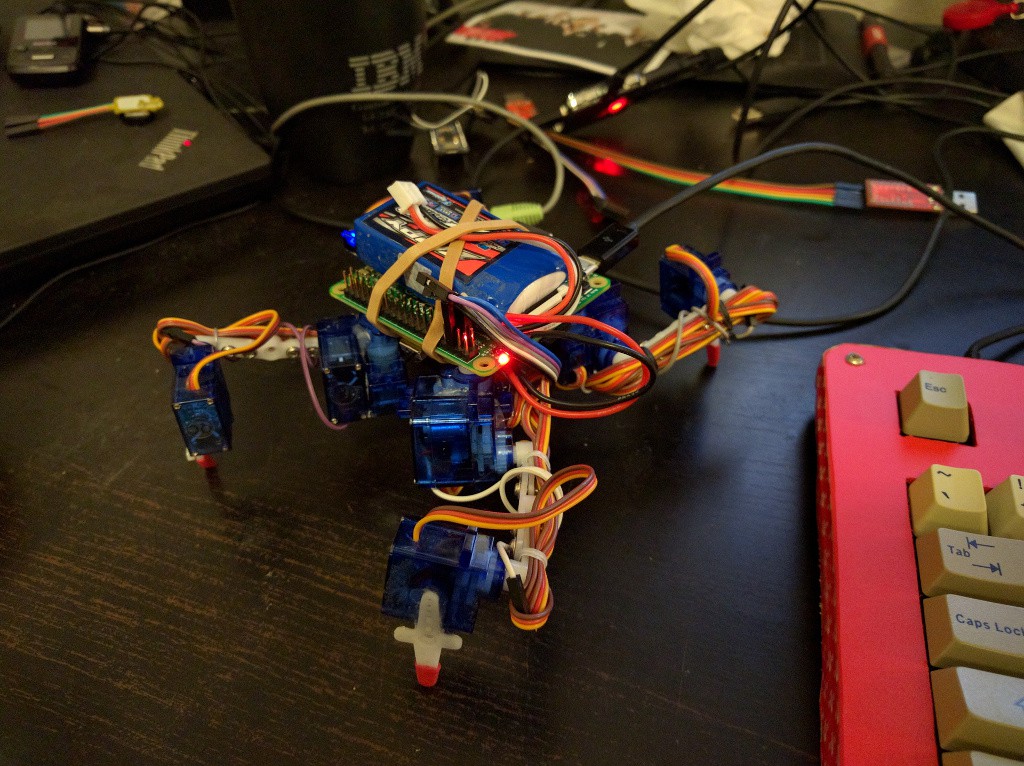
Except I decided to sit down and refactor the Python code a little bit (and I need to adjust it to a different servo configuration, etc.), so it’s still some time until it actually walks.