Failure: HC-SR04 Distance Sensor¶
Published on 2015-06-23 in Tote.
What is a robot without sensors? Just a remote-controlled toy! It’s time to add some external sensors to Tote.
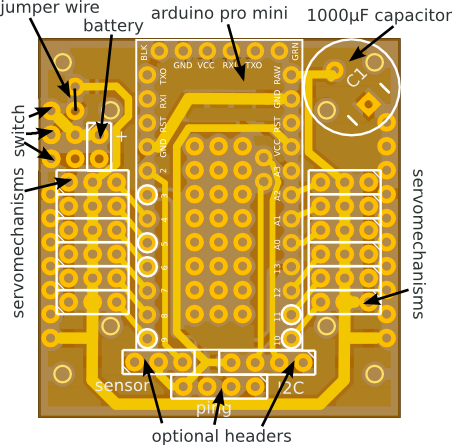
If you looked at the PCB , you probably noticed the four pins broken out at the bottom. Yes, they match the pinout of a cheap HC-SR04 ultrasonic range finder. It should be a great way to add some obstacle avoidance or person following capabilities to Tote, just like its older brother µKubik has.
{kind=link}
\
So let’s do it. The trigger pin is connected to pin 3 on the Arduino, and the echo is on pin 13 – yes, I ran out of pins and had to reuse the LED pin for this. As a side effect, the LED blinks every time we read the distance. A quick sketch to test the sensor:
#define TRIG_PIN 3
#define ECHO_PIN 13
void setup() {
Serial.begin(115200);
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
}
void loop() {
unsigned long int duration, distance;
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
duration = pulseIn(ECHO_PIN, HIGH);
distance = duration / 58.2;
Serial.print(distance);
Serial.println(" cm");
delay(500);
}
And lo and behold, proper readings:
Yay, so that’s it, right? Now just add some basic logic to the code to make the robot stop when there is an obstacle in front, and we are ready to go, right? Wrong.
For some reason, the robot stop immediately after the first step. What’s happening?
OK, let’s connect the serial and see. The distance readings are all 0. Why? Disconnect the battery, connect the Pro Mini to the USB and look again. Readings are all connect. Disconnect the USB power and run it from battery – 0 again. Argh.
Wait a minute. The Pro Mini actually has VCC at 5V while it’s being powered from the USB cable, and 3.3V when it runs from the battery… What were the power requirements of that HC-SR04 sensor again? Where is the datasheet …
Right, working voltage 5V. Sigh. Of curse I did check that before when I was designing the board, but back then I still wanted to use a 5V Pro Mini, and a voltage regulator. I later switched to 3.3V and completely forgot about the sensor. So what can be done?
Well, looking at what I have lying around I took a 5V Pro Mini, a 2S LiPo battery and a 5V voltage regulator, and quickly replaced Tote’s guts.Warning: the 5V Pro Mini doesn’t have the RAW pin separated from the VCC pin like the 3.3V version does, so don’t connect it to the USB2TTL while it’s in the robot – the power draw will quickly fry the power regulator in Pro Mini. You have to remove it for programming.
You can see that now it kinda works, except for random times when the sensor returns completely weird values. Maybe the sensor is broken? Replacing the sensor didn’t help much. Taking three readings in a quick succession and taking maximum of them didn’t help either – it seems, that the sensor just has some moments when the readings are consistently bad. I can’t think of a solution.
While this is a failure, I thought that I will publish it anyways, as even the failures give us something to learn from – often even more than the successes. And speaking of failures, remember how I promised to connect a Raspberry Pi to Tote? That’s too cancelled for the moment – my A+ RPI suddenly stopped working, the power LED won’t shine, the activity LED shines weakly when powered from USB, and not at all when powered through the pins. I guess I have a streak of bad luck. Oh well.