Remote control with ESP8266 and Micropython¶
Published on 2015-06-17 in Tote.
Since some time I was planning to write a log about how to extend Tote with additional boards. I was planning to show examples of connecting the Raspberry Pi, Teensy 3.1, ESP8266 and anything else I could find, all running different kinds of Python. That would also let me score more points in the “ mountain of prizes “ as those boards use chips from all kinds of manufacturers, and I could claim then that Tote “uses” them. But reality as always interferes.¶
Raspberry Pi now requires at least 3GB SD card for its system image, and turns out I don’t have any that big around.
The Micropython port for Teensy 3.1 doesn’t yet support UART (even though the module with all the functions is there, they just do nothing).
The Micropython port for ESP8266 doesn’t have enough room for my Python code for controlling the robot.
So I had to settle down to just showing how to do remote control over something else than a TV remote. I’m still using the ESP8266 with Micropython on it, except instead of controlling the motions of the whole robot with it, as I planned, I’m just passing the keypresses from the computer, and the Arduino still takes care of moving the legs. Oh well. It still took me several hours of debugging to get working.
Let’s start with a very simple thing – controlling the robot over a serial cable, connected directly to an USB2TTL module stuck in your computer’s USB port. You need three wires: GND, TX and RX. You connect them to the FTDI header on the Pro Mini, and to the USB2TTL in following way:
GND ↔ GND
RX ↔ TX
TX ↔ RX
By the way, this is also an excellent way of debugging the robot – you can print stuff to the serial console and verify that the program does what you think it should. Anyways, you will need some extra code on your Pro Mini too. There are two ways to go about this.
You can just have a very simple servo controller on the Arduino side, and feed it servo positions every frame from the Python code for the gaits . That’s exactly what the µKubik quadruped robot does, except instead of a serial cable it uses serial over Bluetooth. But the code is the same. This gives you a lot of control on the Python side.
The other way is to leave all the Arduino code from original Tote , but replace the TV remote part with code that simply reads the key presses from the serial . That’s the route we are going to take, and it looks like this:
Now, let’s replace that cable with something a little bit more modern. ESP8266 is all the rage these days, and there is a highly experimental port of Micropython for it, so why not? Those ESP-01 boards are not too useful anyways, because they have hardly any pins broken out, but they are enough for our purpose, as the RX and TX pins are there. I began by making a simple rig for programming them:

Then I followed the excellent Adafruit tutorial on flashing Micropython to ESP8266 and got a working console. Yay! Now, diving into recently added documentation , I figured out how to write a simple “repeater” server:
import esp
import sys
def recv(socket, data):
sys.stdout.write(data)
socket = esp.socket()
socket.onconnect(lambda s: s.onrecv(recv))
socket.bind(('0.0.0.0', 2323))
socket.listen(1)
It just prints on the console anything it gets on port 2323. I saved that as_esp8266/scripts/main_.py and recompiled – the ESP9266 port of Micropython doesn’t yet have filesystem support, so you have to add all files to the firmware itself. Then restart, get to the console with_USB2TTL_, and make it connect to the WiFi:
import network
network.connect('your ssid', 'your password')
That gets remembered, so you don’t have to do it every time. Quick test of the server using_netcat_:
$ nc 192.168.0.13 2323
xxx
h
ddddd
x
And we are finished on this side. Or so I thought. But we will get to that. Now, for the robot side, I flashed that “serial control” version of the Tote code to the Pro Mini, and made a simple connector for the ESP8266 using some female headers, two-sided tape and a bunch of wires:
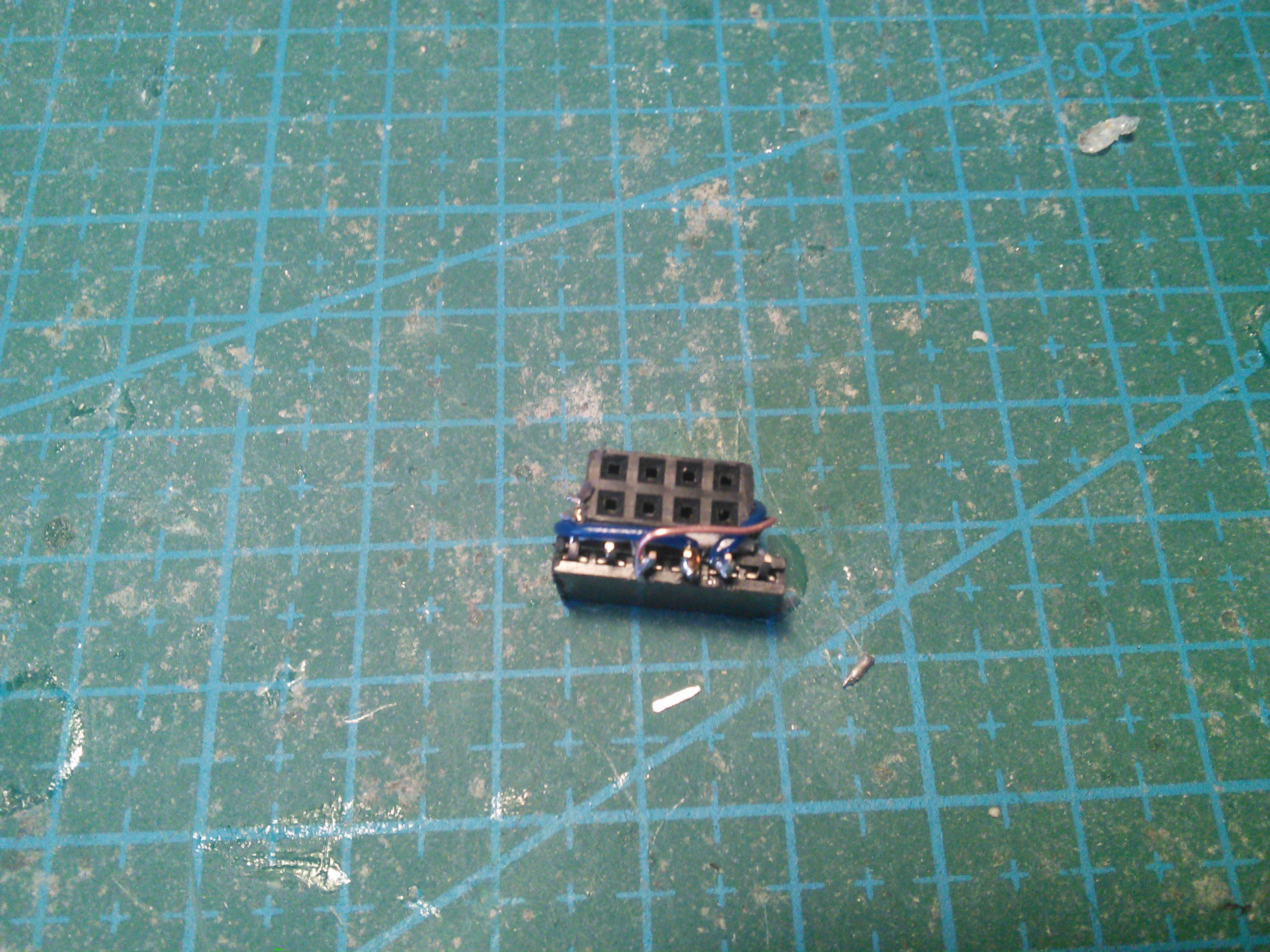
It fits nicely on the_FTDI_ connector on top of the robot:
Now let’s test it. I made it so that after powering on, the robot does nothing and waits for “xx” on the serial – that’s because many boards will print random stuff to serial while booting, and you don’t want that to be interpreted as commands. So I switch the robot on, send “xx” and… nothing. What?
Fast forward four hours. I’m up to my ears in debugging. Tried 3 different ESP8266 boards and 3 different Pro Minis, debugged it using_SoftwareSerial_ and by connecting the RX pin to the ESP and the TX one to the_USB2TTL_, one exceptionally helpful fellow on the_#arduino_ IRC channel even wrote a serial-forwarding code for me in low-level AVR C. The outcome? Both the Pro Mini and ESP8266 work perfectly fine when connected to the computer through_USB2TTL_. But as soon as you connect them to each other and try to transmit serial data at 115200 baud rate, half the data gets corrupted. That’s over a 4mm long wire. Adding pullups, pulldowns, capacitors, etc. doesn’t help. I sat over this until the small hours of the night, but didn’t figure out a solution. I guess I will need to start saving for an osciloscpe.
After a night’s sleep, I went back to that Micropython code, grepped for “115200”, and changed it to “9600”, recompiled, flashed, changed the speed on the Arduino side and what do you know, it works!
Next I will try to get that SD card for the RPI and show you the more low-level control. Who knows, maybe by this time the picam also arrives, and we can have some OpenCV fun.