Different Power Sources¶
Published on 2015-05-31 in Tote.
Power source is a hard problem for any walking or flying robots. Unlike the robots that roll on wheels (or tracks), walkers have to carry its own weight, and the battery can be easily the heaviest part of the robot. They also tend to draw quite a lot of current for their many actuators, so that further limits the choices.
For the base Tote, I went with a single-cell LiPo battery, mostly because they have the best weight-to-power ratio, and they are relatively easy to get, either from hobby model shops, from electronics shops, or from discarded cellphones, electric toothbrushes, etc. but there are other possibilities.
Alkaline batteries are well known by the robot experts as absolutely the crappiest batteries you could use for your robot. Not only they are heavy, but also the current you can draw from them is almost nothing, and they will discharge pretty quickly, after which you can simply throw them away. So can Tote be powered with alkaline batteries? Let’s find out!
As you can see, you can, but not for very long. But it’s nice to see that Tote can actually lift them. That means that I could probably swap them for someNiMH orNiCd rechargeable batteries, and it would be all good. Let’s see!
That actually went pretty well! Apart from some weight-shifting problems, I would probably need to find a better way of attaching them. Also, using AAA cells instead of AA would improve the weight, but unfortunately I don’t have any AAA rechargeable batteries on me at the moment. Finally, aLiPo battery salvaged from a broken power bank, for comparison.
That huge battery should keep it going whole day.
Now, let’s look at some more advanced hack. For an experiment with force-sensing servos, that I will describe separately at some point, I needed the voltage given to the servos to be constant, so that I would get consistent readings. The obvious solution is to add a switching voltage regulator (anUBEC), and I actually thought about that when designing Tote’s printed circuit board, so there is a place for it:\
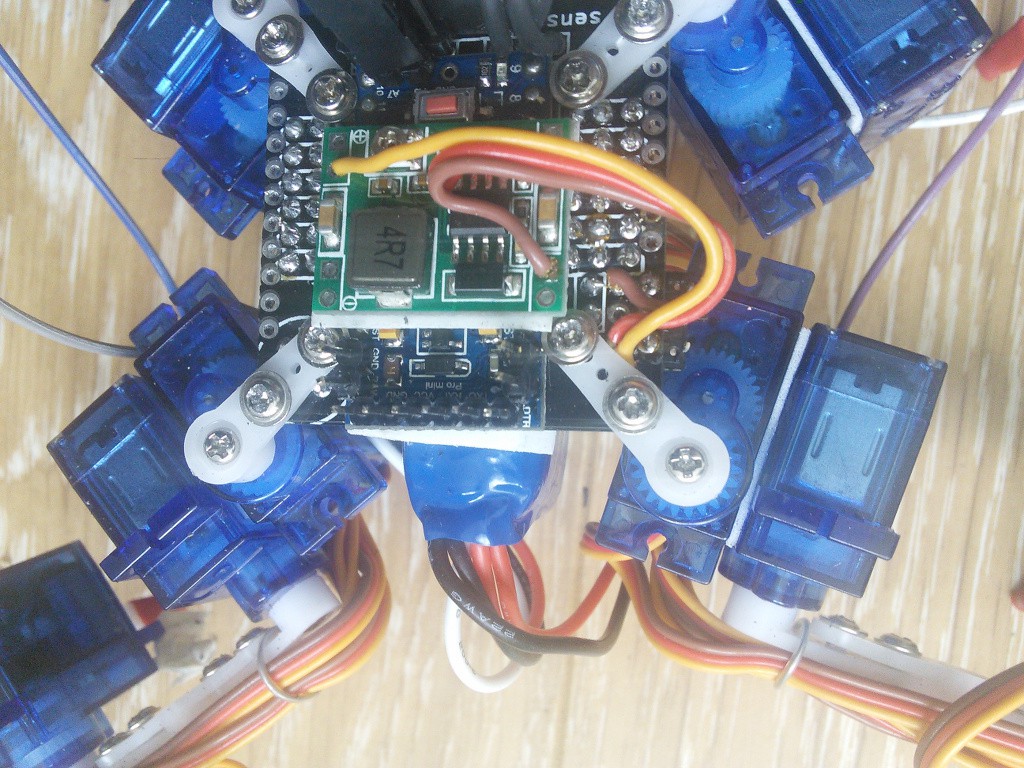
It’s conveniently located just after the power switch and the voltage- monitoring circuit, so that those two will still work correctly. One problem that I had is that this regulator needs higher voltage to regulate it_down_to the voltage desired, so I needed to use a battery with higher voltage. So I used a 2SLiFePo4battery here. What is that? They are all the rage these days among the power flashlight geeks. They are similar to LiPo batteries, except they are much stabler both chemically and electrically, giving pretty good 3.3V voltage and not exploding if you as much as look at them funny. Unfortunately, you need a special charger for them – the LiPo charging modules are no good.
Of course, for experiments on your desktop, you can always just plug the robot into a bench power supply, and have it drag a cable behind. It’s actually more convenient than having to recharge or swap batteries all the time. Unfortunately you can’t simply power this robot from your computer’s USB. It needs way more power than the 500mA the USB standard specifies.
That concludes my experiments with power sources. As you can see, you have a lot of choices.