Tote¶
Affordable spider robot

Where are my robots? It’s already 15 years into the twenty-first century, and we still don’t have robots everywhere. Sure, there are some simple vacuum cleaners and some robo-pets for the ultimate geeks, but that is not enough! Especially since the vacuum cleaners don’t even walk. We need more walking robots everywhere!
I think that one of the reasons why we don’t have robots creeping and crawling all around us is that researching walking robots is a time- consuming, hard, and very expensive activity, traditionally confined to the secret military laboratories. You need a big room with a crane to hang your robot on, in case it falls, you need lots of hydraulic actuators and a pump to power them, you need sophisticated sensors and complex algorithms crunched on powerful computers, etc. At least that’s how it has been so far. Even building a simple hexapod from a kit, which, is not much more than a simple toy, can set you back hundreds of dollars. No wonder we make no progress.
That has to change. If we put a walking robot on the desk of every high school student out there, and let them try hack on them and try the craziest ideas, sooner or later someone will come up with a bunch of cool tricks that let you solve that leg trajectory optimization problem on an Arduino at 50Hz a second, instead of a supercomputer crunching on a single frame whole day. We have a lot of corners we can cut there. Plus, those same high school students are likely going to continue their experiments and research and graduate in robotics and build us that robot butler that we always wanted. Or something.
So that’s my plan with Tote. To solve the humanity’s burning problem of glaring lack of robots, I’m working on a robot that is suitable as a base for experimenting with robot gaits and related problems.
Logs¶
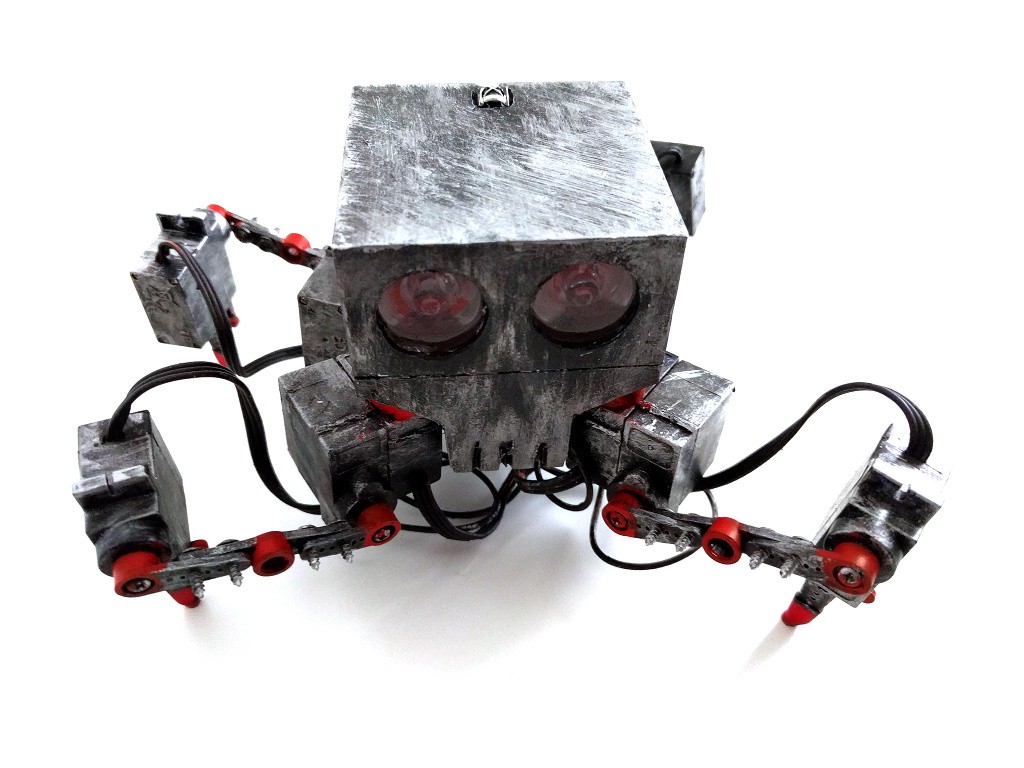
2018-06-07 - Reviving the Skull Tote
2017-01-15 - Gangsta
2017-01-14 - Programming the Spinal Cord
2017-01-11 - New Year Reflections
2017-01-11 - Choosing the Brains
2016-12-22 - imath.h
2016-12-21 - CORDIC
2016-12-07 - Version 5
2016-11-10 - Pimp Your Robot II
2016-11-09 - Pimp Your Bot
2016-01-29 - The Way Forward?
2016-01-23 - Another Tote in the Wild
2016-01-07 - Tote Zero
2015-12-20 - PyBoard
2015-12-04 - Pi Zero
2015-12-02 - Micro:Tote
2015-11-21 - I²C Slave
2015-11-05 - Nothing Happens
2015-10-22 - Another Batch of PCBs
2015-09-25 - Vertical Climb
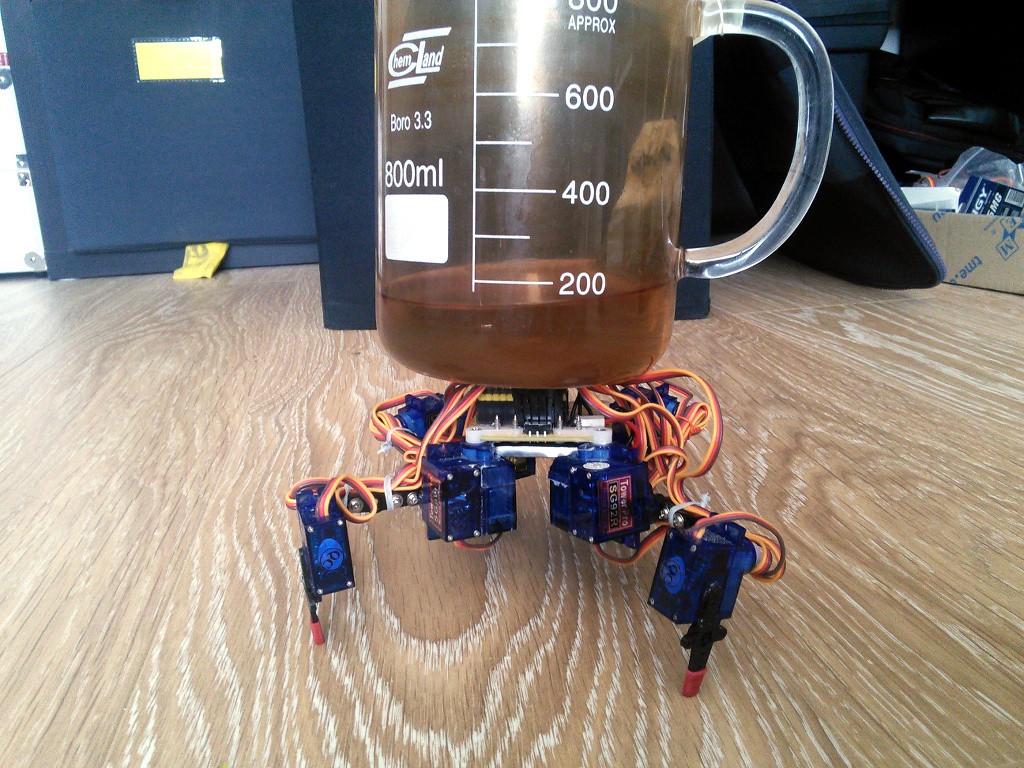
2015-09-04 - Weight Lifting
2015-09-03 - Making Tote without a PCB
2015-08-28 - Totes in the Wild
2015-08-25 - Out of the Prize
2015-08-15 - Version 4 of PCB Documented
2015-08-15 - Proprioception Revisited: Touch
2015-08-15 - Hackaday Prize Quaterfinals Video
2015-08-14 - System Diagram
2015-08-14 - Licenses
2015-08-12 - New New Board in the Wild
2015-08-01 - New New Printed Circuit Board
2015-07-30 - Follow Me, I Say!
2015-07-24 - Follow Me!
2015-07-21 - Testing The New Printed Circuit Board
2015-07-16 - Cheap Chinese STM32 Boards
2015-07-11 - Custom Controller
2015-07-10 - Distance Sensor, Second Try
2015-07-07 - Logicoma-kun
2015-07-02 - Using Teensy 3.1
2015-06-30 - Schematics
2015-06-26 - PCB Redesign
2015-06-23 - Failure: HC-SR04 Distance Sensor
2015-06-17 - Remote control with ESP8266 and Micropython
2015-06-10 - Using Arduino Pro Micro
2015-06-09 - Dirty PCBs are dirty
2015-06-04 - Proprioception on the Cheap
2015-05-31 - Hacking on Tote
2015-05-31 - Different Power Sources
Links¶
Components¶
Component |
Count |
Notes |
|---|---|---|
SG90 Microservo |
12 |
Or any other model of a small, 9g microservo, SG92R work even better |
Arduino Pro Mini 3.3V |
1 |
Arduino Nano 3.3V will work too |
3.7V LiPo Battery |
1 |
Or other power source |
Printed Circuit Board |
1 |
https://bitbucket.org/thesheep/tote/src/tip/fritzing/pcb2.zip |
Power Switch |
1 |
|
6-pin Male Pin Headers |
7 |
optionally more/other headers |
47kΩ 1206 SMD Resistor |
2 |
optional for the battery monitoring circuit |
47nF 1206 SMD Capcitor |
1 |
optional for the battery monitoring circuit |
1000µF Electrolytic Capacitor |
1 |
optional for avoiding brownouts |
IR Signal Sensor |
1 |
optional for remote control |
IR Remote |
1 |
optional for remote control |
piezo buzzer |
1 |
optional for sound |
battery charging circuit |
1 |
optional for built-in battery charging |
2A voltage regulator |
1 |
optional for alternate power sources |
Instructions¶
The assembly guide is published at http://tote.rtfd.org/ .