Up Side Down¶
Published on 2016-02-14 in Henk the Hexapod.
Today I worked a little bit more with the robot. It’s actually quite convenient to have it sit on a box (so that the legs are in the air) next to my computer, connected over the USB cable.
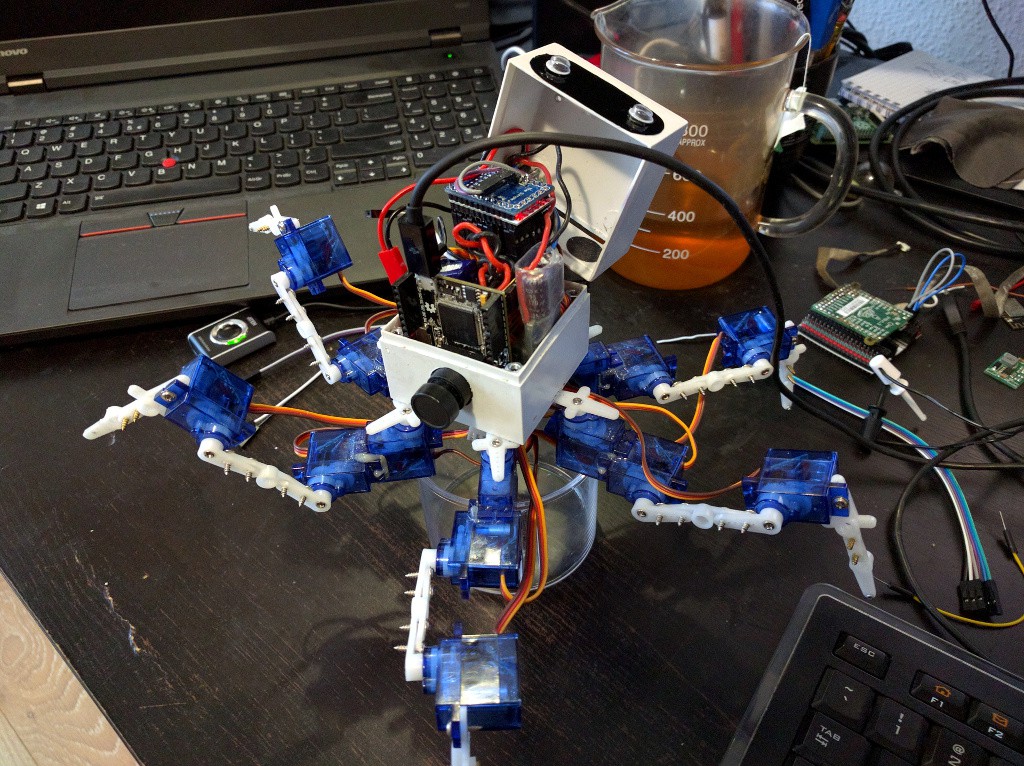
As you can see, the OpenMV camera is actually installed up-side-down. That’s because it was more convenient for me, and it looks a little bit like a snout. I figured it wouldn’t matter, as I would simply reverse the y coordinate of any results I get from the camera. It turns out that sometimes it does matter – in particular, the face detection algorithms don’t detect up-side-down faces. I looked for a way to flip the image, and after I couldn’t find anything, I asked on the OpenMV forum, where the authors immediately helped me . Turns out the sensor has a setting which you can enable to make it flip the image in hardware. Here’s a photo from the eyes of the robot:

The quality is not that great, because it’s pretty dark in my room. I’m using a wide-angle lens, so you can see the two front legs of the robot in there.
Next I went on working on the walking code (again). As usual, starting with the Servo class:
import pyb
import ustruct
import math
class Servo:
min_pos = 600
max_pos = 2400
pos_range = 180
def __init__(self, servos, index, reverse=False, trim=0):
self.servos = servos
self.index = index
self.reverse = reverse
self.trim = trim
def move(self, radians=None, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees += self.trim
if self.reverse:
degrees = self.pos_range - degrees
position = self.min_pos + (
degrees * (self.max_pos - self.min_pos) / self.pos_range)
position = min(self.max_pos, max(self.min_pos, position))
self.servos[self.index] = position
class Servos:
ADDRESS = 9
def __init__(self):
self.bus = pyb.I2C(2, pyb.I2C.MASTER)
self.servos = [0] * 18
def __setitem__(self, index, value):
self.servos[index] = value
def __getitem__(self, index):
return Servo(self, index)
def update(self, servos=None):
if servos is None:
servos = range(18)
for servo in servos:
try:
pyb.disable_irq()
self.bus.mem_write(
ustruct.pack('<' + 'H', self.servos[servo]),
self.ADDRESS,
servo,
)
finally:
pyb.enable_irq()
Now I can move each of the joints of the robot individually. Next up, leg (practically the same as in Tote ) and then body (the hard part) inverse kinematics.