Henk the Hexapod¶
Scrapped. See Hexapod Henk MkII.
This project waited on the shelf for so long, that I decided to scrap it and rebuild into project-10534 . Go there for the latest news on the project. This project is kept for archive.
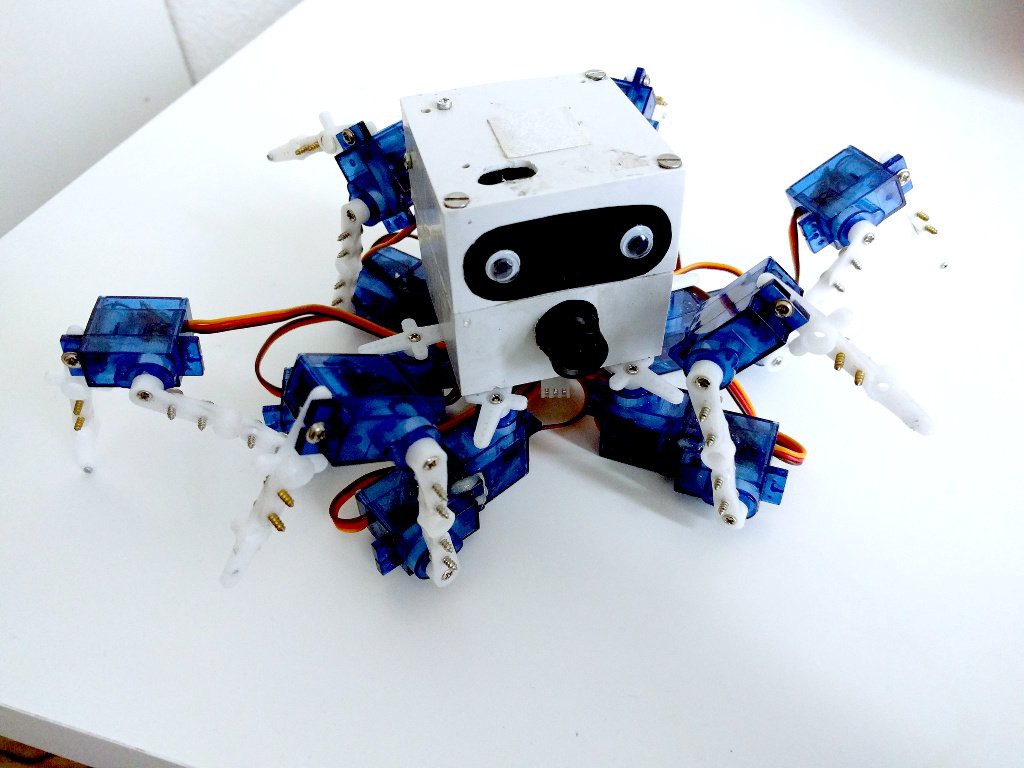
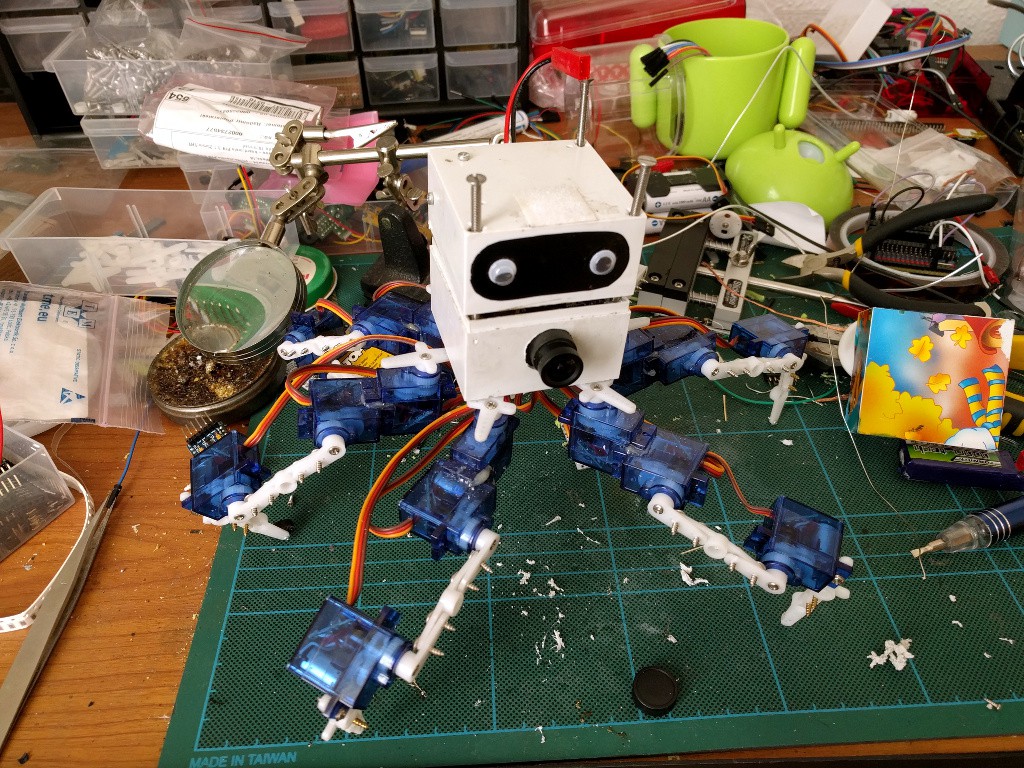
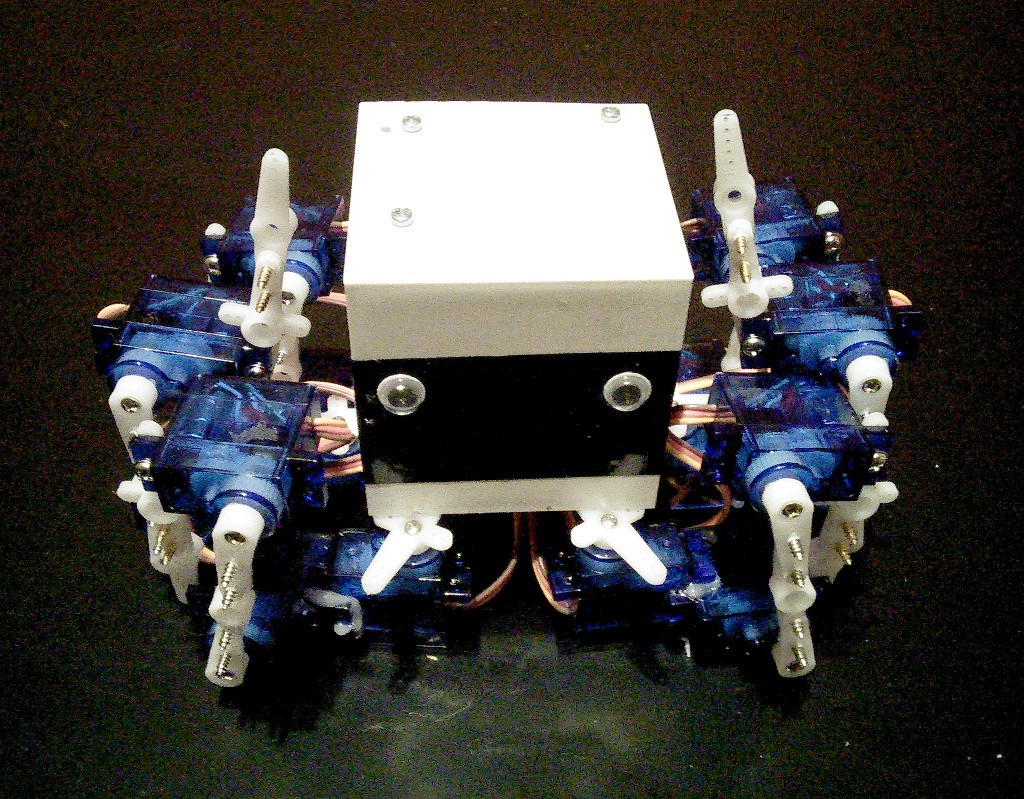
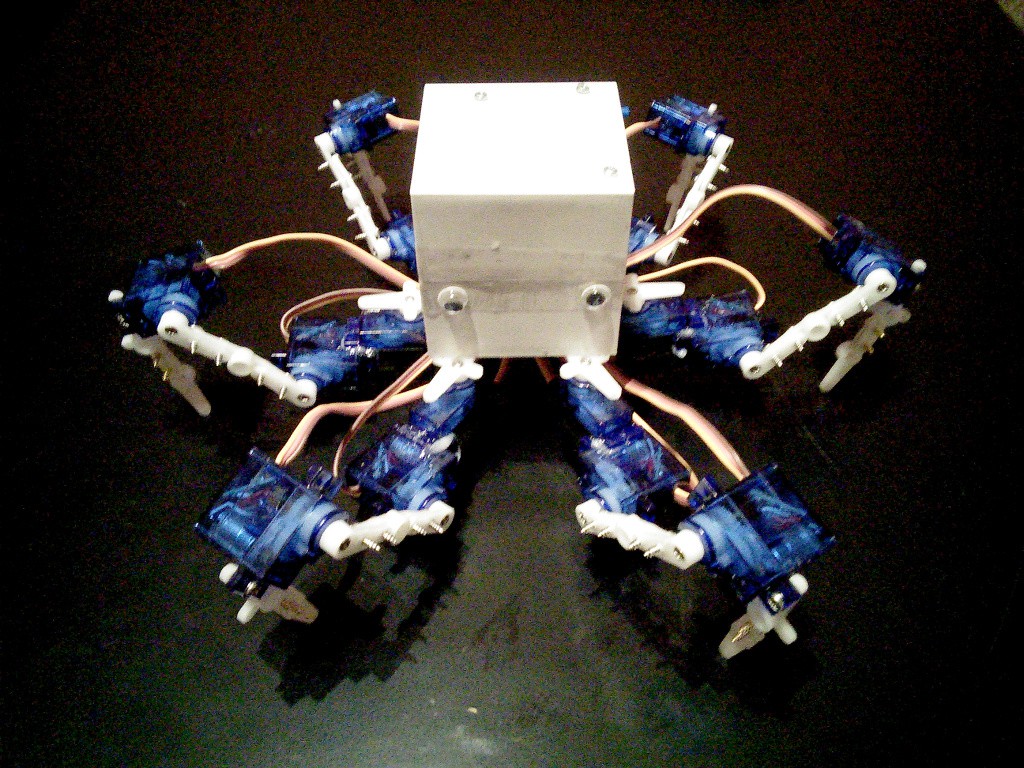
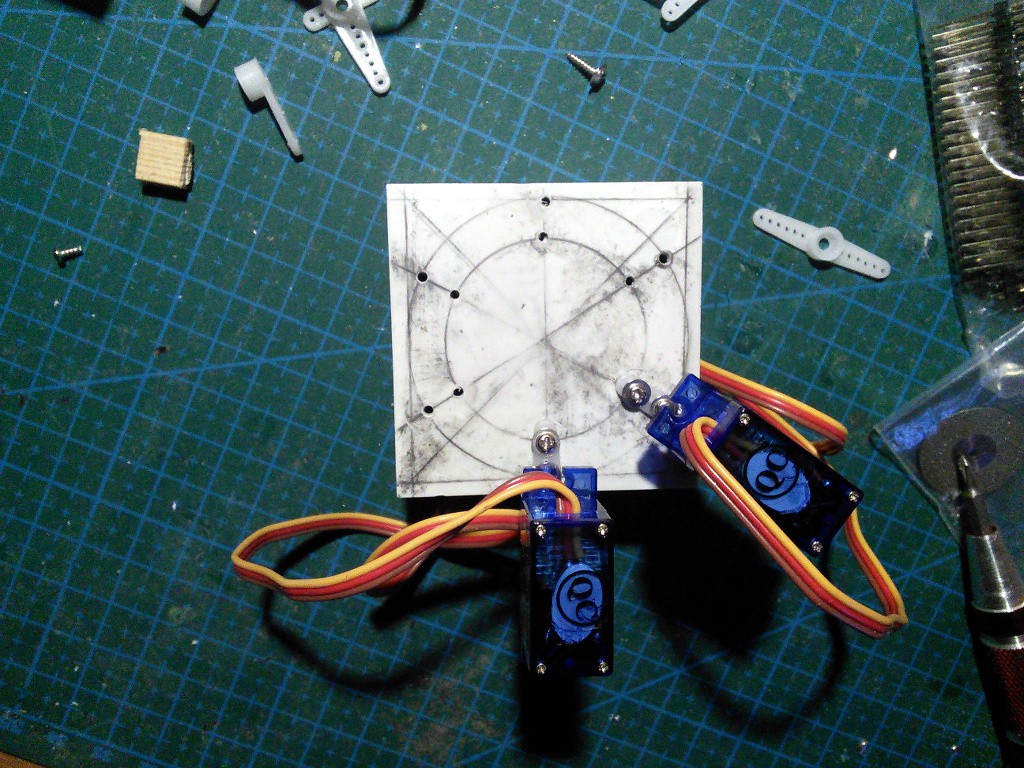
The legs are arranged in a circle, every 60°. The alternative was to have them in two rows, but they seemed to be too close together that way.\
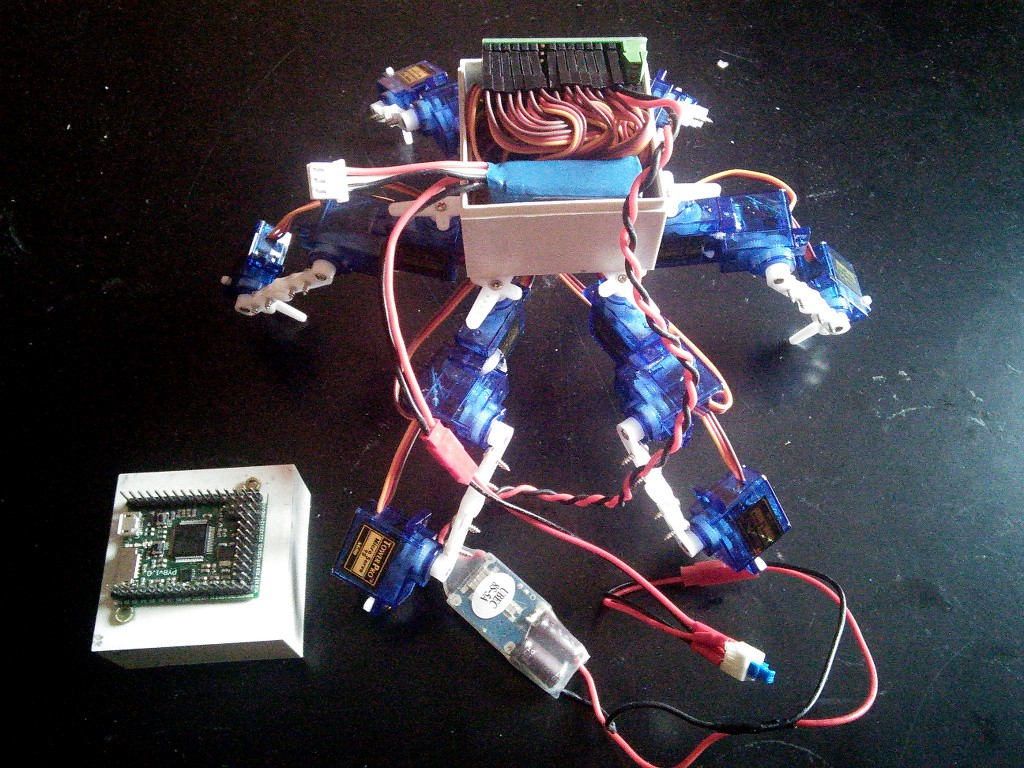
The power switch has a couple of 47kΩ resistors added to it, which form a voltage divider, connected to an analog pin. This way I can tell the battery voltage, and monitor it. Since the analog pin also doubles as DAC pin, I had to remove the speaker. It’s a bit of a shame, but it was too quiet anyways. I might add a proper audio board in the future, if really needed (or monitor the voltage differently).
Logs¶
2016-03-25 - Henk MkII
2016-02-14 - Up Side Down
2016-02-13 - Brain Surgery
2014-12-29 - Moving a Leg and Making Sounds
2014-12-27 - Ready to Program
Links¶
Components¶
Component |
Count |
Notes |
|---|---|---|
SG90 Microservo |
18 |
|
Pro Mini 3.3V |
1 |
|
OpenMV |
1 |
|
5V 5A UBEC |
1 |
|
2S 350mAh LiPO Battery |
1 |
|
47kΩ Resistor |
3 |
|
Cable with Dupont Connector |
7 |
|
Micro Switch |
1 |
|
Screw |
22 |
No idea what size, they were added to the servos. |
Googly Eyes |
2 |