Everything Connected¶
Published on 2014-11-25 in Pico-Kubik quadruped robot.
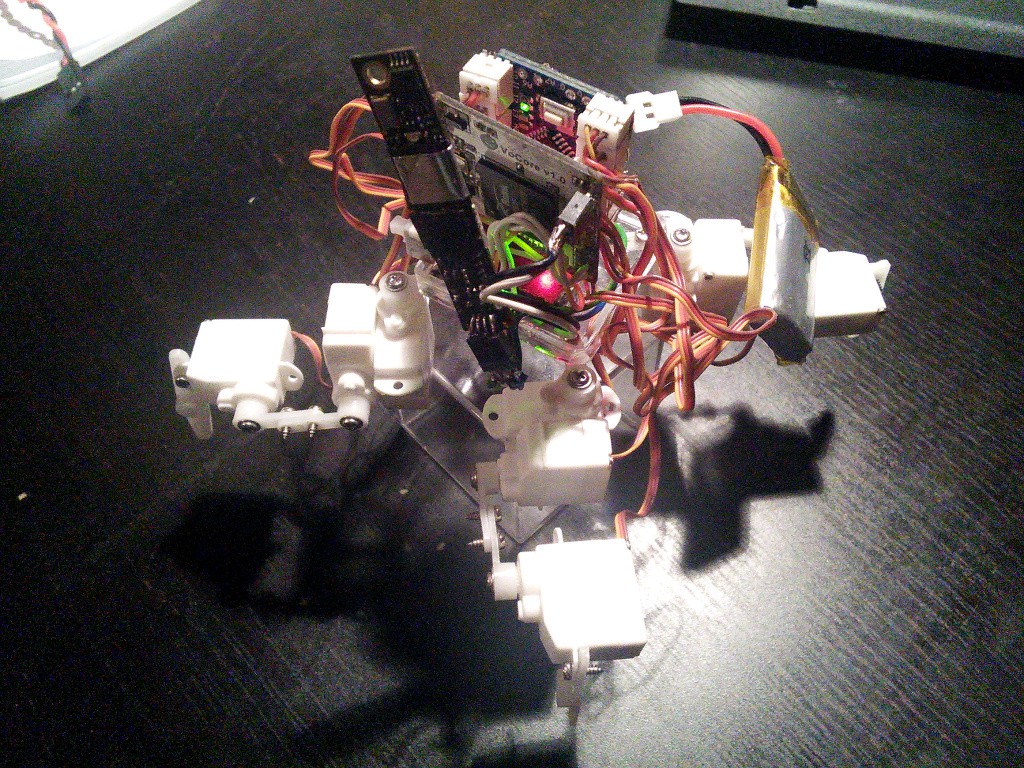
Finally all the parts come together: 12 servos,Arduino Pro Mini,VoCore_board, camera module and battery. I was a little worried about the battery handling this load, but it turns out it is around 400_mA together (VoCore is up to 200_mA_ alone). It will probably be more when the servos work, but the battery should still handle that.
Of course I initially connected the serial line from_VoCore_ to_Arduino_ backwards, but fortunately no other problems. The serial line works, but I still need to build a custom image for the_VoCore_ to disable logging to console on it – otherwise it interferes with the servo commands.
The_UNIX_ version of_Micropython_ works nicely on_VoCore_, and can write to the serial just as to a normal file. The example program I run just shifts the whole body around a little, and it went a little crazy because of the console logging, but it will work just fine.
The camera only works in the photo mode, with_fswebcam_, and I can’t get it to stream, but I think I will leave it for now. I might get it to work later on.
What is left now is all the software, as well as holding all the parts together in a better way than with a rubber band. I also might add a voltage regulator later on, when I get one small enough.
And how about a paper chassis, making it look like the robots in Uber’s failed Human Resources ? I will have to think about it!\