Family Grows¶
Published on 2015-05-28 in µKubik quadruped robot.
As I’m writing the guide for building and programming this robot , I need a way to test if the instructions make sense and are simple enough. So I’ve build another brother for µKubik, this time following my own instructions to the letter. It went well, except I didn’t count how many servos I have available beforehand, and I ended up one servo too short. Oh well.
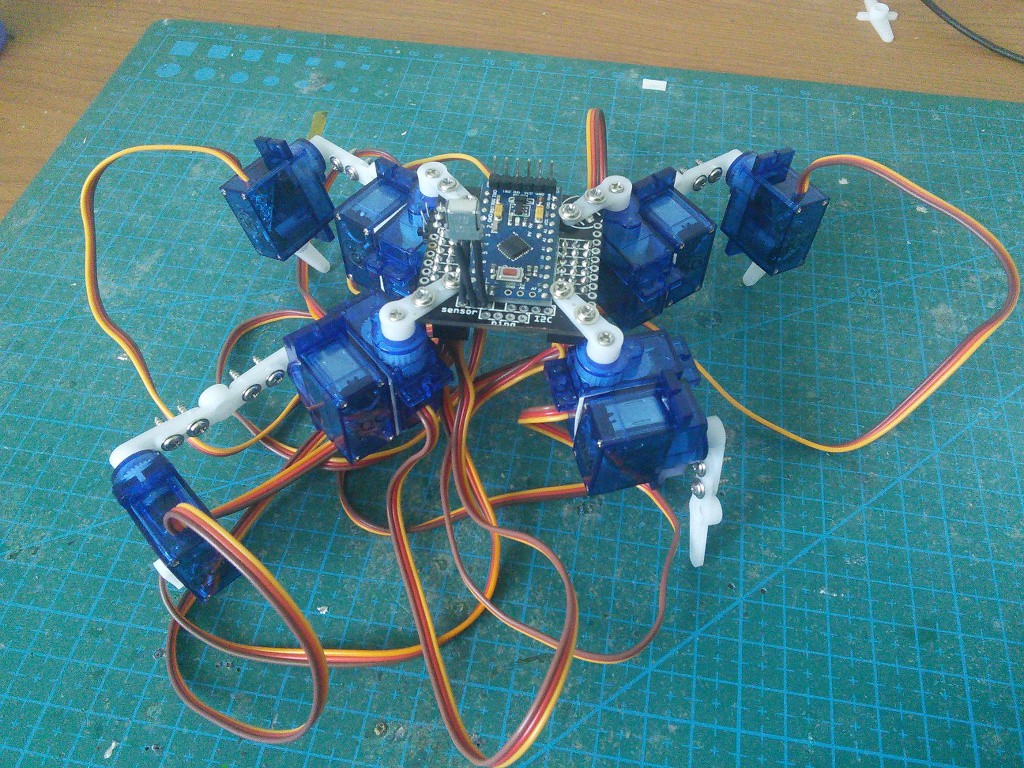
On the good side, the version with most of the parts mounted underside actually works very well and is very compact. Also, there was no servo reversing necessary, so the robot walks pretty much out of the box (you do have to adjust the default servo positions).
Now I will try and add an ESP8266 module to it, with Micropython firmware, and see if I can control it that way.