µKubik quadruped robot¶
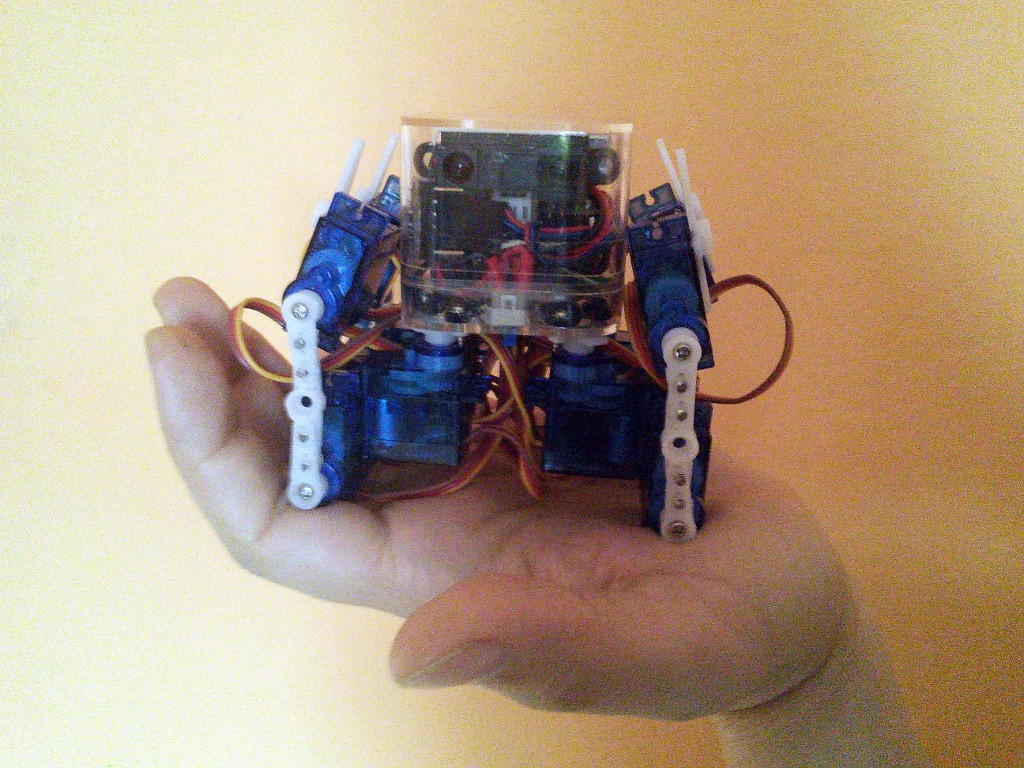
Cheap and simple tabletop quadruped robot controlled with Python.
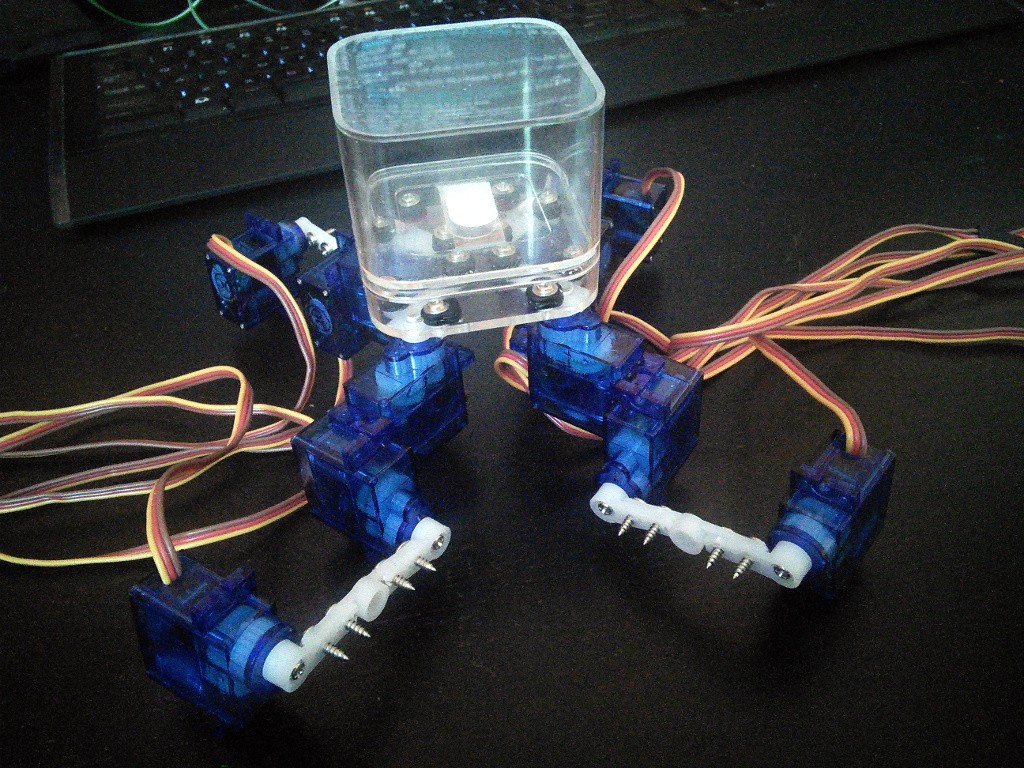

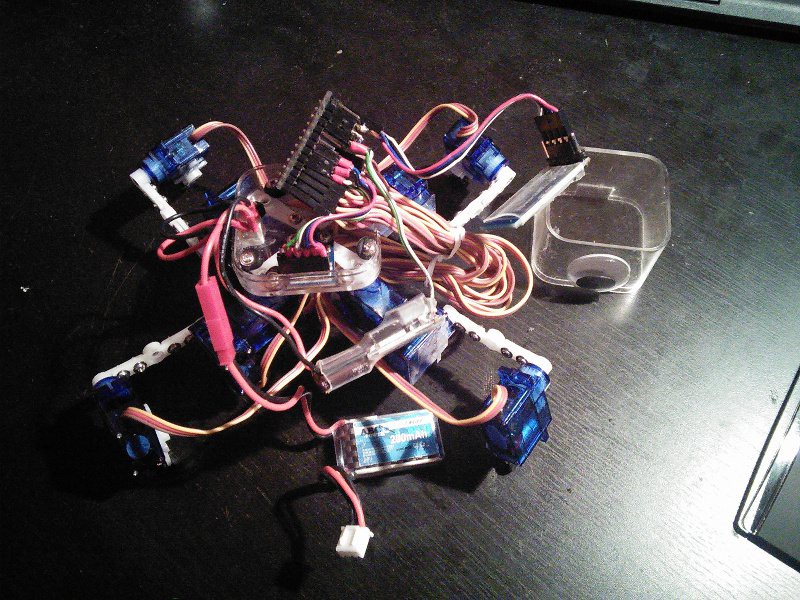

I consider this project more or less complete hardware-wise. I might add a sensor or two more if I can fit them inside… It uses an old iPod Nano box for the body, but you can use pretty much anything: a pill box, a plastic jar, even just a piece of a PCB. All the parts together cost me around $75.
Software-wise, I have the creep and trot gaits working, and I have a program that lets me control it with a gamepad. I’m working on more interesting behaviors.
Logs¶
2015-05-29 - Sensing the Servo Position
2015-05-29 - Sensing the Servo Force
2015-05-28 - Family Grows
2015-05-08 - Tote, µKubik’s younger brother
2015-04-17 - Force Sensing
2015-03-19 - Younger Brother
2015-01-03 - Follow Me!
2014-12-23 - One More Sensor
2014-11-02 - Walking around the desk
2014-11-02 - Size does matter
Links¶
Components¶
Component |
Count |
Notes |
|---|---|---|
Arduino Pro Mini |
1 |
|
Tower Pro SG90 Microservo |
12 |
|
2s LiPo Battery |
1 |
|
HC05 Bluetooth Module |
1 |
|
GY-61 Accelerometer Module (MPU6050) |
1 |
|
8S 5A Switch-Mode UBEC |
1 |
|
Universal PCB, goldpins, wires, etc. |
1 |