The Base¶
Published on 2017-03-07 in Marvin.
So this is a successor of the Micro:Bob robot, that would be a little less “gangsta”. I designed a PCB for attaching everything together – the micro:bit, the servos and the battery – so that you don’t have an ungodly mess of wires held together with two-sided tape. I also left some extra holes in the PCB to which you can solder paperclips, to build on top of it and make it a little more interesting.
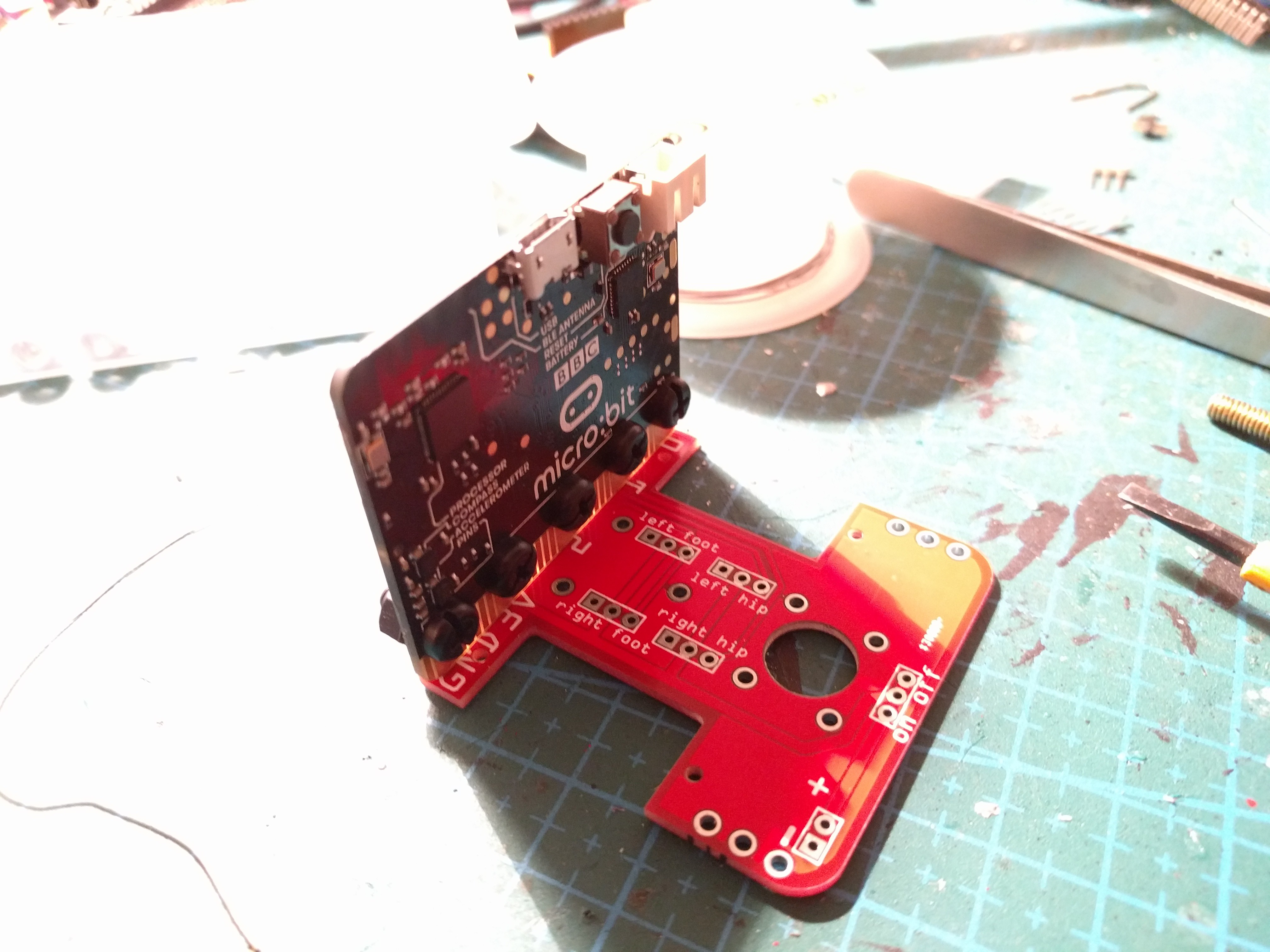
I found a nice method of mounting the micro:bit to the PCB without using the bulky edge connection – just use loops of wire made out of paperclips, and plastic bolts (to not damage the micro:bit). The servos fit right into the slots – I just made the screw holes a bit too tight, had to enlarge them a bit later. The battery holder is still attached to the backs of the servos with a two-sided tape – there is no room on the board for a different way of attaching it, unfortunately.
In hindsight, I should have made more sockets for the servos – letting you to plug several servos to the same pin, so they move together, so that you can make hands that move together with the legs, etc. – maybe in the next version.