Analog Prototype¶
Published on 2019-02-09 in D1 Mini X-Pad Shield.
The prototype of the analog joystick shield is now assembled.
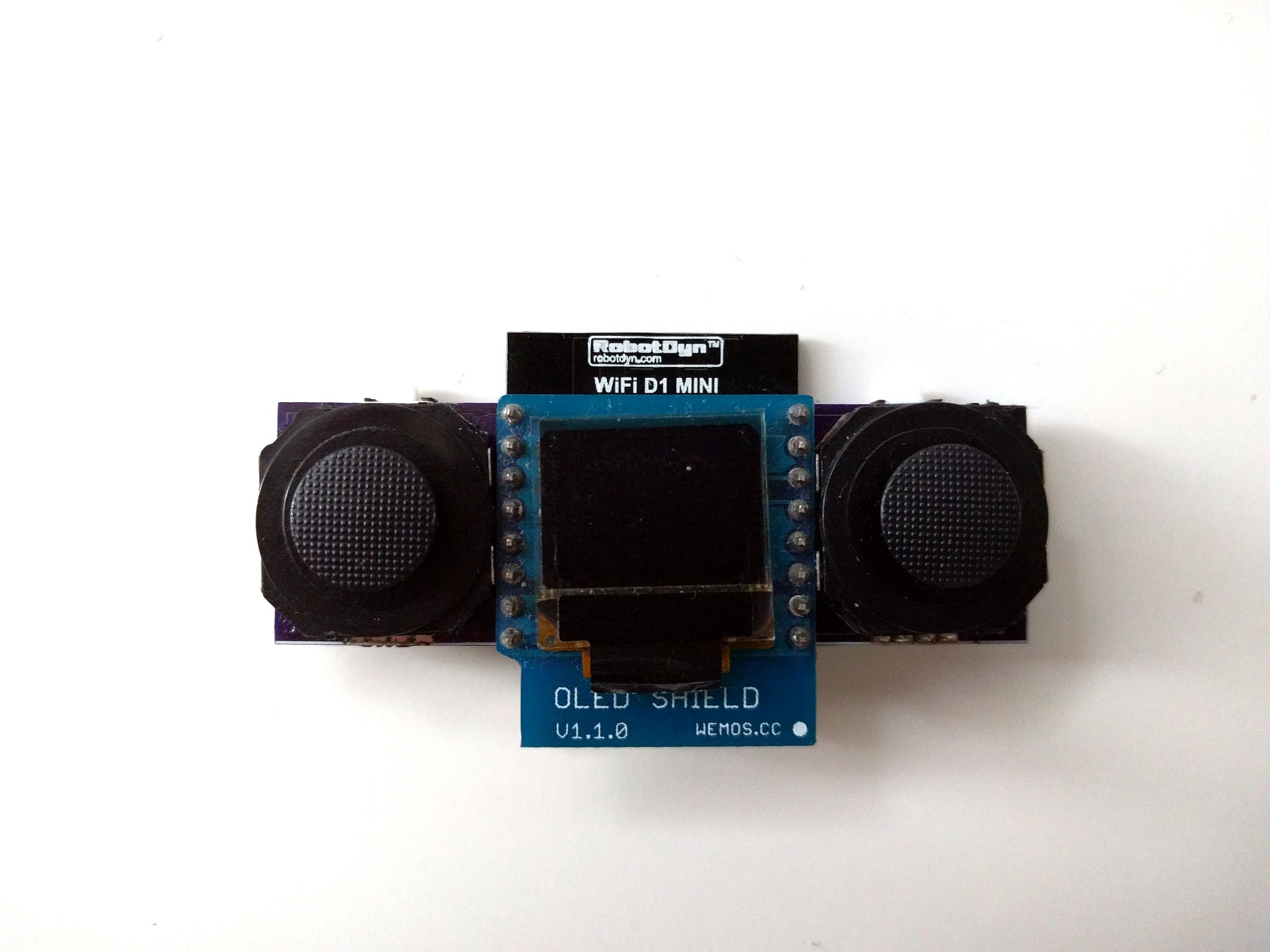
I also modified the original firmware to return additional four bytes for the positions of the sticks:
———- more ———-
#include "USI_TWI_Slave/USI_TWI_Slave.c"
#define BUTTONS_COUNT 4
#define JOY_COUNT 4
#define INT_PIN 5
#define I2C_ADDRESS 0x11
const uint8_t button_pins[BUTTONS_COUNT] = {8, 2, 9, 10};
const uint8_t joy_pins[JOY_COUNT] = {0, 1, 7, 3};
volatile bool clear = false;
volatile uint8_t buttons = 0;
volatile uint8_t joy_values[JOY_COUNT] = {127, 127, 127, 127};
void request() {
USI_TWI_Transmit_Byte(buttons);
for (uint8_t i = 0; i < JOY_COUNT; ++i) {
USI_TWI_Transmit_Byte(joy_values[i]);
}
clear = true;
}
void setup() {
for (uint8_t i = 0; i < BUTTONS_COUNT; ++i) {
pinMode(button_pins[i], INPUT_PULLUP);
}
pinMode(INT_PIN, INPUT);
USI_TWI_Slave_Initialise(I2C_ADDRESS);
USI_TWI_On_Slave_Transmit = request;
}
void loop() {
static uint8_t last_buttons = 0;
static bool interrupt = false;
uint8_t current_buttons = 0;
for (uint8_t i = 0; i < BUTTONS_COUNT; ++i) {
current_buttons <<= 1;
current_buttons |= !digitalRead(button_pins[i]);
}
if (clear) {
Flush_TWI_Buffers();
clear = false;
buttons = 0;
if (interrupt) {
pinMode(INT_PIN, INPUT);
interrupt = false;
}
}
buttons |= last_buttons & current_buttons;
if (buttons && !interrupt) {
interrupt = true;
pinMode(INT_PIN, OUTPUT);
}
last_buttons = current_buttons;
for (uint8_t i = 0; i < JOY_COUNT; ++i) {
joy_values[i] = (analogRead(joy_pins[i]) >> 2) & 0xff;
}
delay(16);
}
I throw away 2 bits worth of precision here, because they are mostly garbage anyways, and because it makes it easier to transmit. Initial test looks good:
>>> import machine
>>> i2c = machine.I2C(-1, machine.Pin(5), machine.Pin(4))
>>> i2c.readfrom(11, 5)
b'\x00y\xff\x8a\x88'
But there seems to be a bit of a problem: the right stick returns funky values — the first one is too low, and the second one is always 0xff. A little bit of investigation, and I found the culprit — I didn’t connect the ground of that side of the board — both the stick and the button — to the ground of the rest. Nothing a quick bodge can’t fix — I added a wire, and now everything works perfectly.