Analog Joysticks¶
Published on 2019-01-13 in D1 Mini X-Pad Shield.
I’m very happy with the version 6.0 and don’t plan to make any further changes, at least for now. It’s perfect both for user interfaces and for games. However, there is one more use case I have in mind, and that is controlling mobile robots. For that analog joysticks would be much better. So I sat down and designed another version, this time with two thumb joysticks, two shoulder buttons, and two buttons on the side for switching modes:
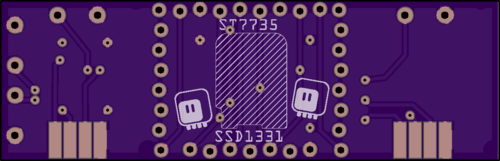
I kept the size the same, but this time I centered the board (the d-pad version is a bit shifted to make room for the four fire buttons). Also, since the thumb sticks are so big, I had to put the shoulder buttons on the back of the board, where the microcontroller is:
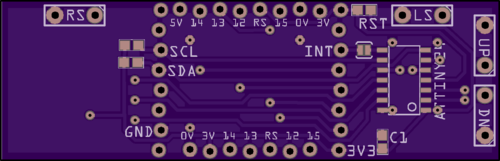
Four analog pins of the AtTiny24 are enough to handle the joystick, and the remaining four are for the buttons — again I didn’t do anything fancy. I kept the interrupt pin and the two footprints for displays — a robot controller could use this for telemetry, menus, or even camera image (but that would probably require an esp32 board).
Of course the final version will have rounded corners. I should have the boards in a few weeks, then I will adapt the code to send not only the button status, but also the four analog measurements.