Initial Decisions¶
Published on 2023-06-02 in Bigbug.
Building a smaller robot is easy, as everything is cheaper, relatively stronger, and the only worry is fitting everything together in the smaller package. Building a bigger robot is a challenge. Everything is more expensive and costs more to ship, takes more power and has smaller margins for strength. And inertia rears up its ugly head. So we need to plan carefully.
Most decisions will be driven by the choice of the servos. The MG996R are almost twice as big as the SG92R I used for Fluffbug, so we will scale the whole thing proportionally. The 23mm width of the SG92R becomes 40mm width of the MG996R, and everything else grows with it.
I’m not going to use a PCB for the body, it would cost too much, and I’m not sure at this point how big it would need to be to fit all the components, so instead it will be a piece of plywood, cut by hand to fit the servo size. I’m going to use the same hand-cut plywood for the leg parts, at least initially, because getting them laser-cut in China and shipped here would be a bit expensive, and I don’t have enough social skill to ask for lasercutter access at my hackerspace.
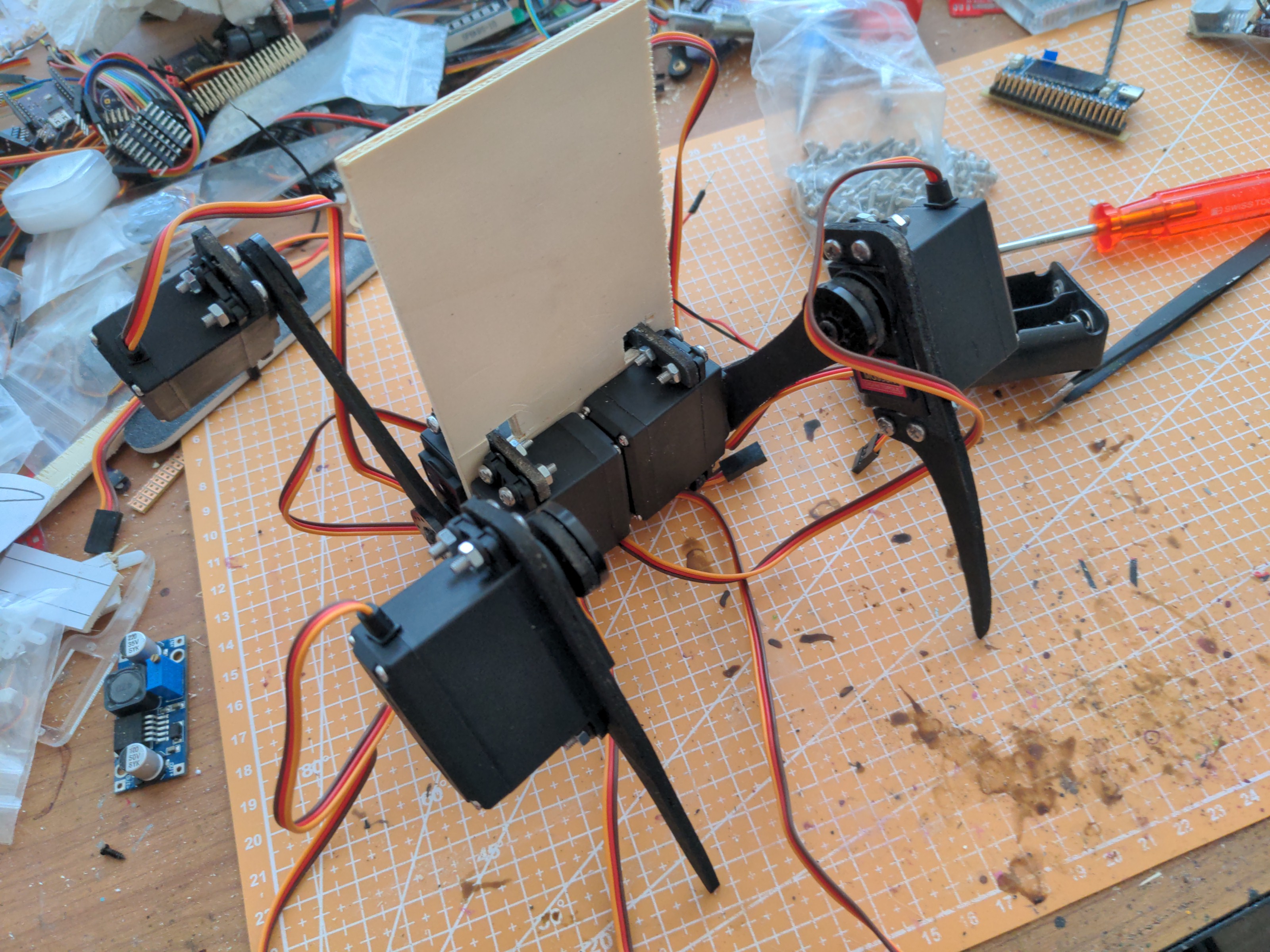
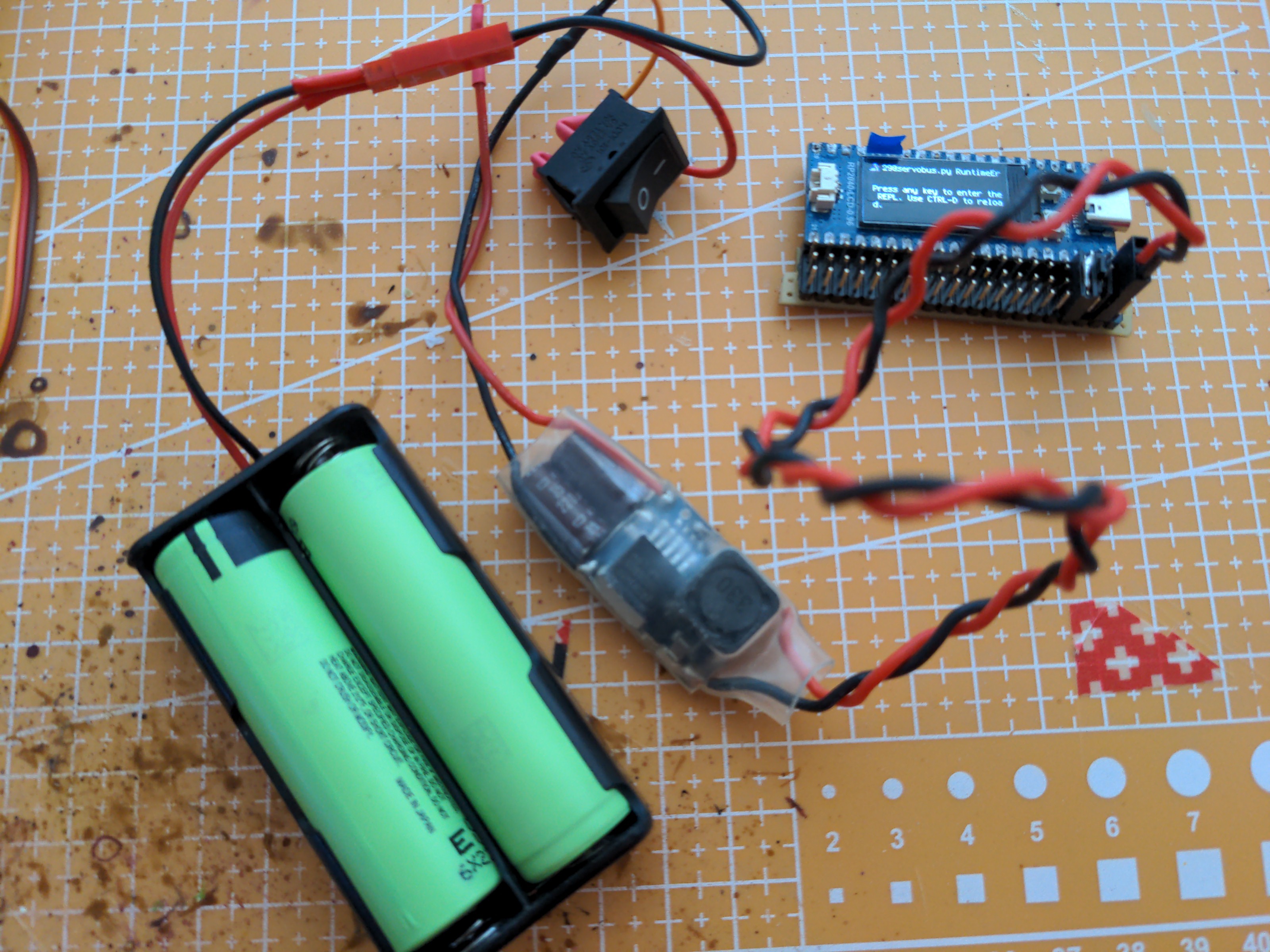
For the brains, I think I will go with another Pi Pico clone, because it’s easy to add servo connectors to it using just prototyping board – I’m not making a dedicated PCB, at least not just yet.\
The power needs a substantial upgrade. I think I can no longer use a single 1S lipo cell. I will go with two 18650 cells, with built-in protection. That means there isn’t going to be a charging circuit or an on-board protection circuit, which simplifies things a bit. On the other hand, I will need to get that 8V to the cozy 5-6V for the servos and electronics, so I will need a buck converter in there, and one that can handle considerable currents. I have some no-name UBEC modules in my drawer, so I’m going to try these, and if that doesn’t work, a 9A buck converter is on order.
That’s pretty much all I should need to get the basic walking going. Once I got that, I will see about maybe putting a Linux single board computer on it, or other things.\