New Body¶
Published on 2023-08-19 in Wee Bug.
I couldn’t sleep last night, and when I can’t sleep I design PCBs. This time I decided to get back to this little cute robot and make a new PCB for its body. The original one was kinda slapped together without much deliberation, just to make it look like its bigger brother Fluffbug but fit the small servo sockets. This time I decided to do it properly.
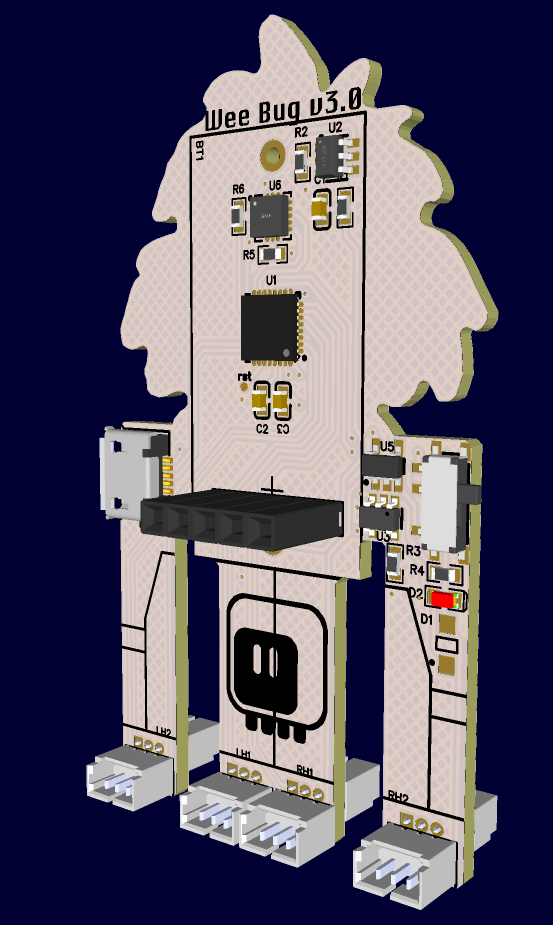
First of all, I want some solution for the cable management. I can’t use IDC plugs like with Fluffbug, because the wires those little servos use are so thin! But I also don’t want to have to re-crimp the plugs after cutting the wires to the right size. So I decided to compromise by adding slots to the PCB under the servos, where you can hide excess wires. Hopefully they are large enough to fit all of them.
Second thing is to give up on the Xiao board, and use a discrete microcontroller chip right on the board. That lets me use all the pins, makes the whole thing smaller, and, if you assemble it yourself, also cheaper. It has the downside that you can’t easily replace the code by changing the modules. Oh well.
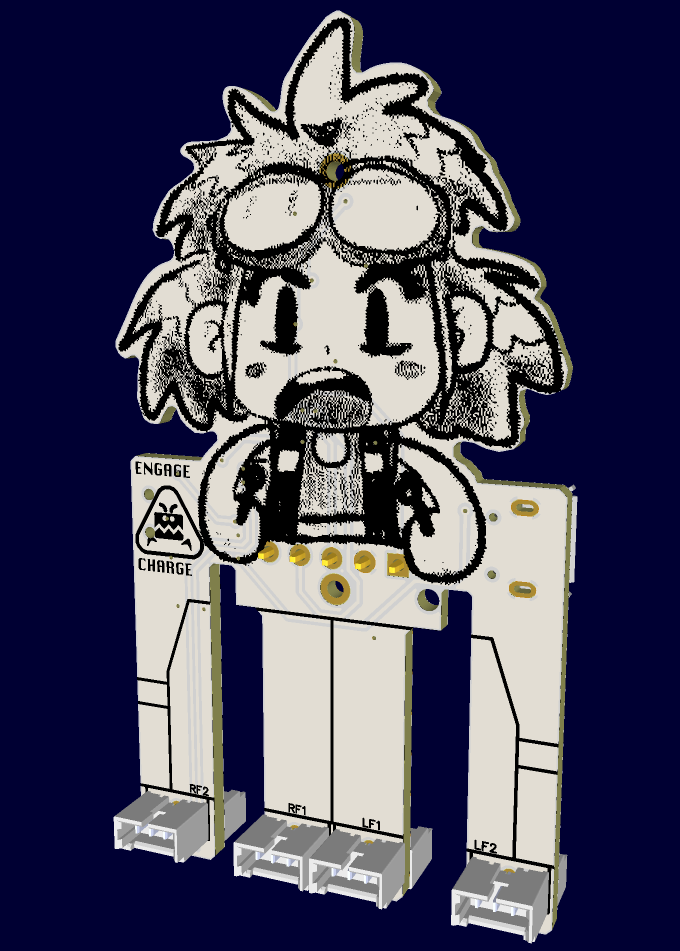
And finally, the most visible change is to add some visual bling. This robot looks a little bit like a crab, and I could have leaned into it, but while I personally think crabs are incredibly cute, many people don’t agree with me, especially the ones with some arachnophobia. So I decided to make it look like a mech from an anime movie or game instead, by adding a picture of a pilot on the front of the PCB.\
Last, but not least, I added an accelerometer chip in there, so that we can have some sensors to react to. The board should arrive in a week or so, and I will probably take some time assembling it. I will keep you updated.