Brain Replacement Again¶
Published on 2021-09-03 in Fluffbug.
Since I am working on a new revision of the PCB, to incorporate the improvements suggested during the mentoring session, and some of the ideas I had since, I’m also wondering whether the choice of the microcontroller for this robot is still optimal.
I have chosen the SAMD21 for several reasons: it runs CircuitPython, which is important for me, because I want this robot to be easy to program; it’s a relatively cheap chip, and requires very few extra components; it has just enough peripherals to drive all the hardware that is needed; and, last but not least, I have become familiar with it through all the other projects I used it in.\
However, several years have passed, and situation has changed considerably. We are in the middle of a chip shortage, which not only changed the prices of the chips, but also their availability — meaning that even with the higher prices there is no guarantee of getting the chip I need. Development of CircuitPython has progressed greatly, and it’s now available for many more platforms. New chips were released, alongside development boards for them. Perhaps it’s time to re- evaluate my options.
There are in particular two new chips that are supported by CircuitPython, relatively cheap, and available despite the global shortage: the ESP32S2 and the RP2040.\
There is one more change that is affecting hobby electronics worldwide — the European Union has started to crack down on the tax and certification regulations, which, while mostly unchanged, suddenly started to be enforced. Suddenly you can’t just sell your hobby projects, claiming it’s up to the buyer to ensure they fit whatever regulations apply — individual hobbyists are suddenly required to perform CE certification, register for VAT and WEEE, and conform to RoHS. All this taken together means that I will probably not be able to bring this project to users by simply producing a few dozen PCBs and selling them on Tindie. I will probably need to limit myself to just publishing the design files, and let the users order and assemble everything themselves. And this means that suddenly ready development boards look much more appealing than a bare chip in QFN form factor — not that it’s so hard to solder QFN by hand, but people tend to be scared of it. So I feel like I should be looking at development boards, and not bare chips here.
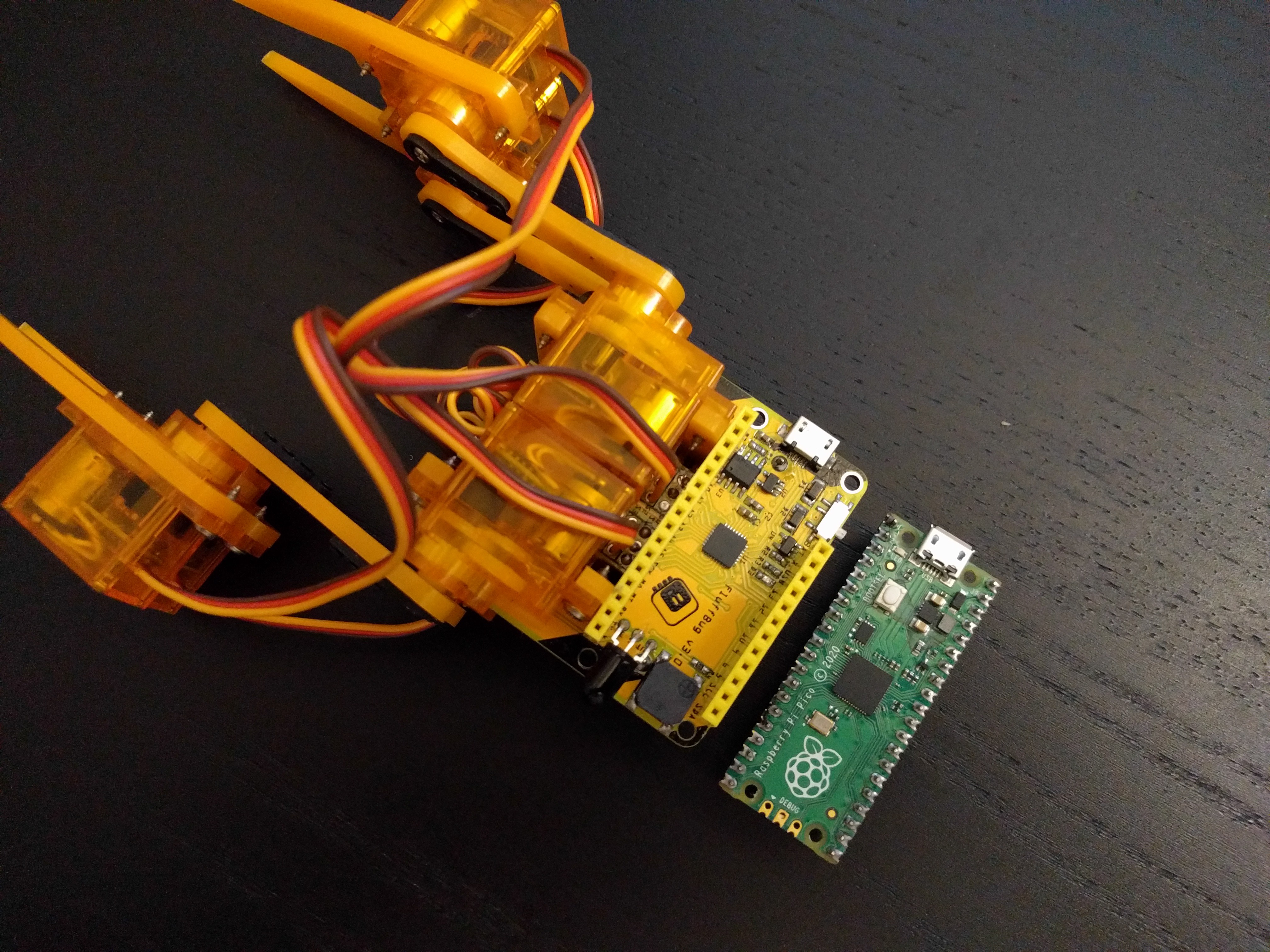
Raspberry Pi Pico is of course one of the boards that I am considering. Produced by the Raspberry Pi Foundation in bulk, it’s actually cheaper than what I could make with a bare chip and required components. And unlike the Feathers, it has enough pins to drive all the servos and have a lot to spare for any additional hardware and expansions. Unfortunately, also unlike Feathers, it comes without a battery charging circuit, or even a power switching circuit, so the PCB for the robot would need to include both, in addition to the battery protection chip I already have there. The buck/boost converter is a nice touch, but it doesn’t help me in this case, where I need to power the servos directly from the LiPO battery anyways. Another downside is a lack of shields for this form factor — they basically came up with their own thing. So I would either need to make my own shields for anything extra I wanted to put on the robot, or put additional headers for shields on the PCB, effectively making an adapter board. Both options don’t sound so bad, but there is some extra consideration here.
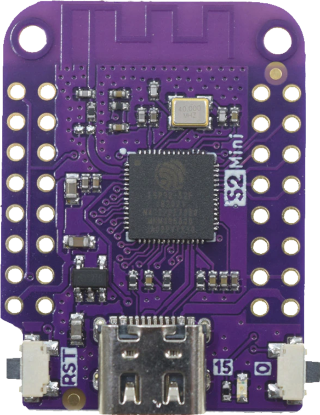
Another option to consider is the WEMOS S2 Mini. I really loved the D1 Mini form factor, and I have made many shields for it. This board is compatible with that, but it adds another row of pins on both sides. I could make the robot make use of the inner pins internally, and leave the outer ones to be used by shields. It also comes with wireless capability, which could make it much easier to control the robot, and even send telemetry back. To make things even more interesting, there is a new adafruit_ov2640 module in CircuitPython , allowing taking pictures, and possibly sending them over WiFi or even processing them on the chip. It can also be used with the Pico, but then what will I do with the image, without connectivity?
I’m currently leaning towards the S2 Mini, even though I haven’t yet figured out how to place the board on the PCB so that the antenna is not next to the servo motors. I’m still waiting for the boards I ordered to arrive, though.