Build Instructions¶
Published on 2018-09-20 in Kubik M0.
Since there is now at least one person trying to build this robot, I’d better post some build instructions. I don’t have a full-blown material with photos yet, but I will try to make it workable.
So, first, what you will need:
the assembled robot PCB, with the battery holder
12 SG90 microservos
24 tiny screws (I forgot to attach them to the PCB, sorry)
4 larger screws (you can use the ones that come with the servos)
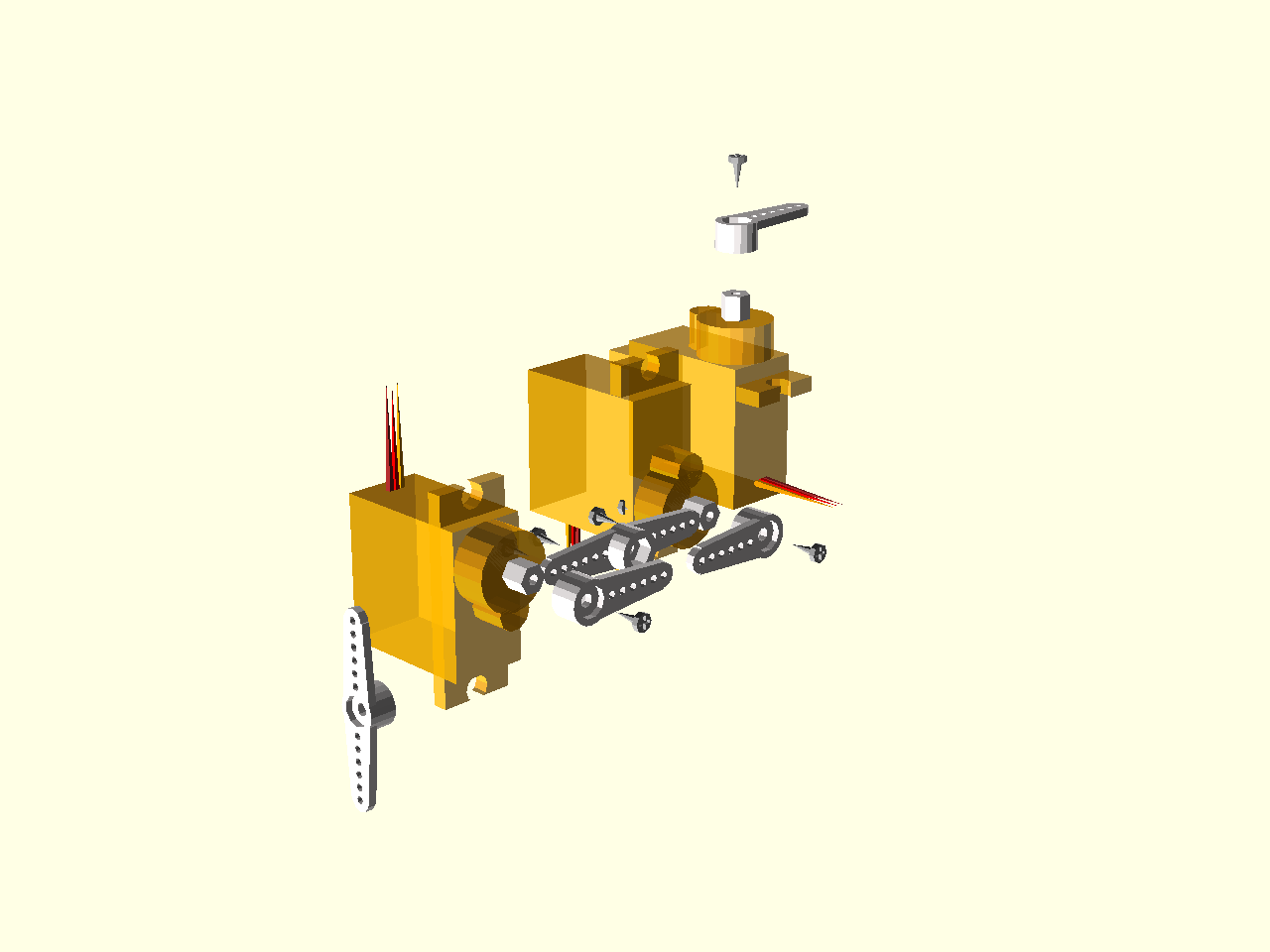
To assemble the legs, first hot-glue four pairs of servos together to form the hips. You will need two “left” and two “right” pairs. The whole leg goes something like this:
And two of them will be a mirror image of that. Don’t put in the screws that hold the servo horns, you will need to adjust the servo positions first.
Connect the servos to the PCB. There are helpful markings on it, such as “FR1” (front right 1) and “HL3” (hind left 3). The number goes 1 for ankle, 2 for knee and 3 for hip. The ground pin is marked, the middle pin is power, and the last pin is signal. You can use male pin headers and plug the servos in, or cut the cables and solder them directly. I prefer the latter, because then you can adjust the wire length and have better cable management. Make sure to leave some extra cable length for the leg to be able to move freely.
Once you have that, you can connect the robot to USB and create a main.py file with the following contents:
import board
import pulseio
import time
_PINS = (
board.SERVO_HL1, board.SERVO_HL2, board.SERVO_HL3,
board.SERVO_FR1, board.SERVO_FR2, board.SERVO_FR3,
board.SERVO_FL1, board.SERVO_FL2, board.SERVO_FL3,
board.SERVO_HR1, board.SERVO_HR2, board.SERVO_HR3,
)
servos = tuple(
pulseio.PWMOut(pin, frequency=75)
for pin in _PINS
)
for servo in servos:
time.sleep(0.25)
servo.duty_cycle = 6300
while True:
time.sleep(1)
That will set all the servos to their middle positions. Disconnect the robot, insert the battery (mind the polarization) and switch the robot on. Now remove each servo from its horn and insert it back, making sure it’s at a right angle to the horn. Secure the horns with the screws.
That gives you a finished physical robot.
I still didn’t write the programs and libraries for it — I will be writing updates here when I do.