First Prototype¶
Published on 2018-06-23 in Kubik M0.
The PCBs from DirtyPCBs arrived today — pretty fast, I have to admit!
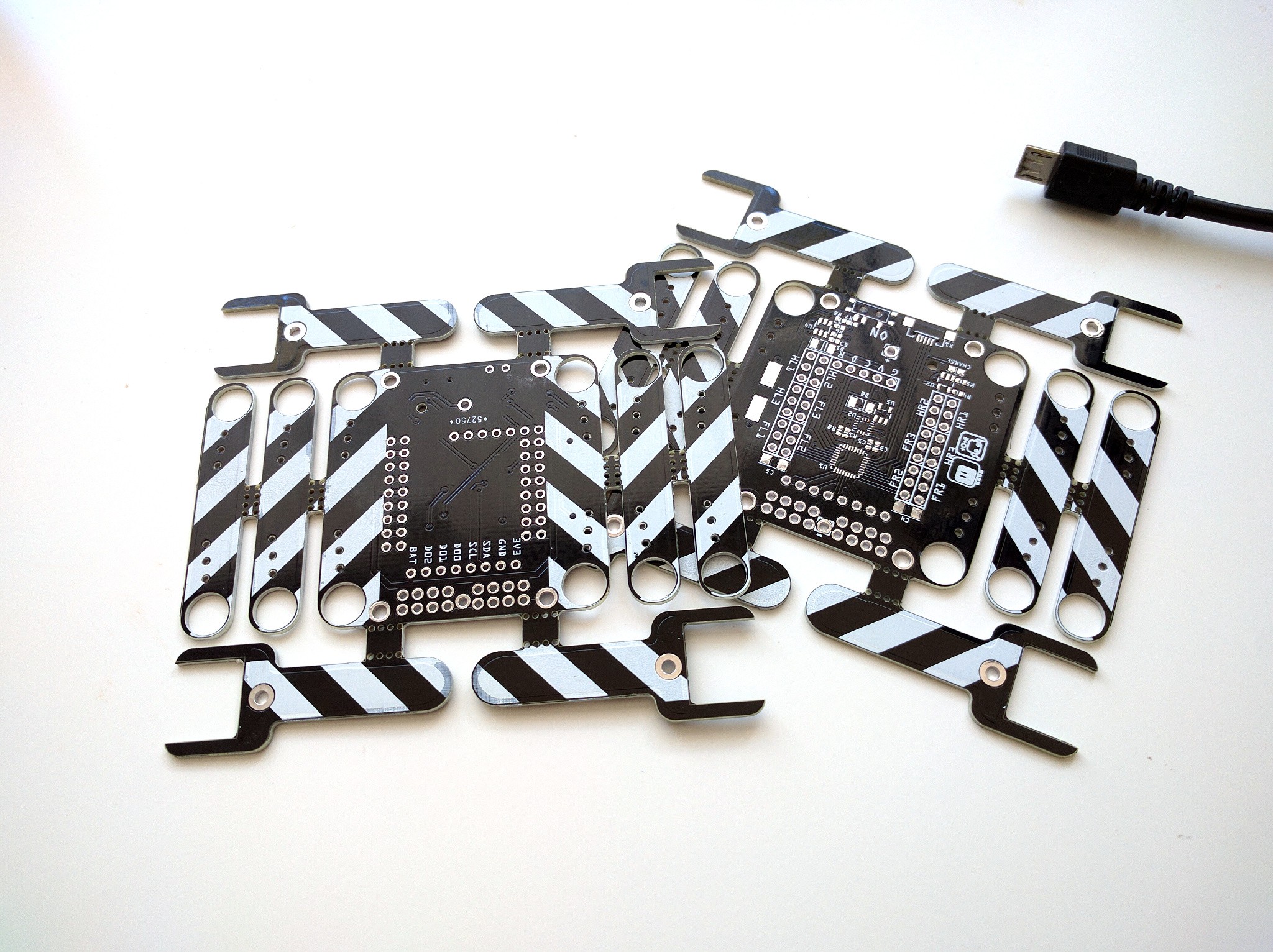
I got one of them assembled. The microcontroller worked first time, but I had to do several resolderings before I got the accelerometer to work. Seems like one of the pins in my gerbers is weird — probably another Fritzing bug. But no that I know it’s there, I can scrap it a bit before soldering and it should be fine.
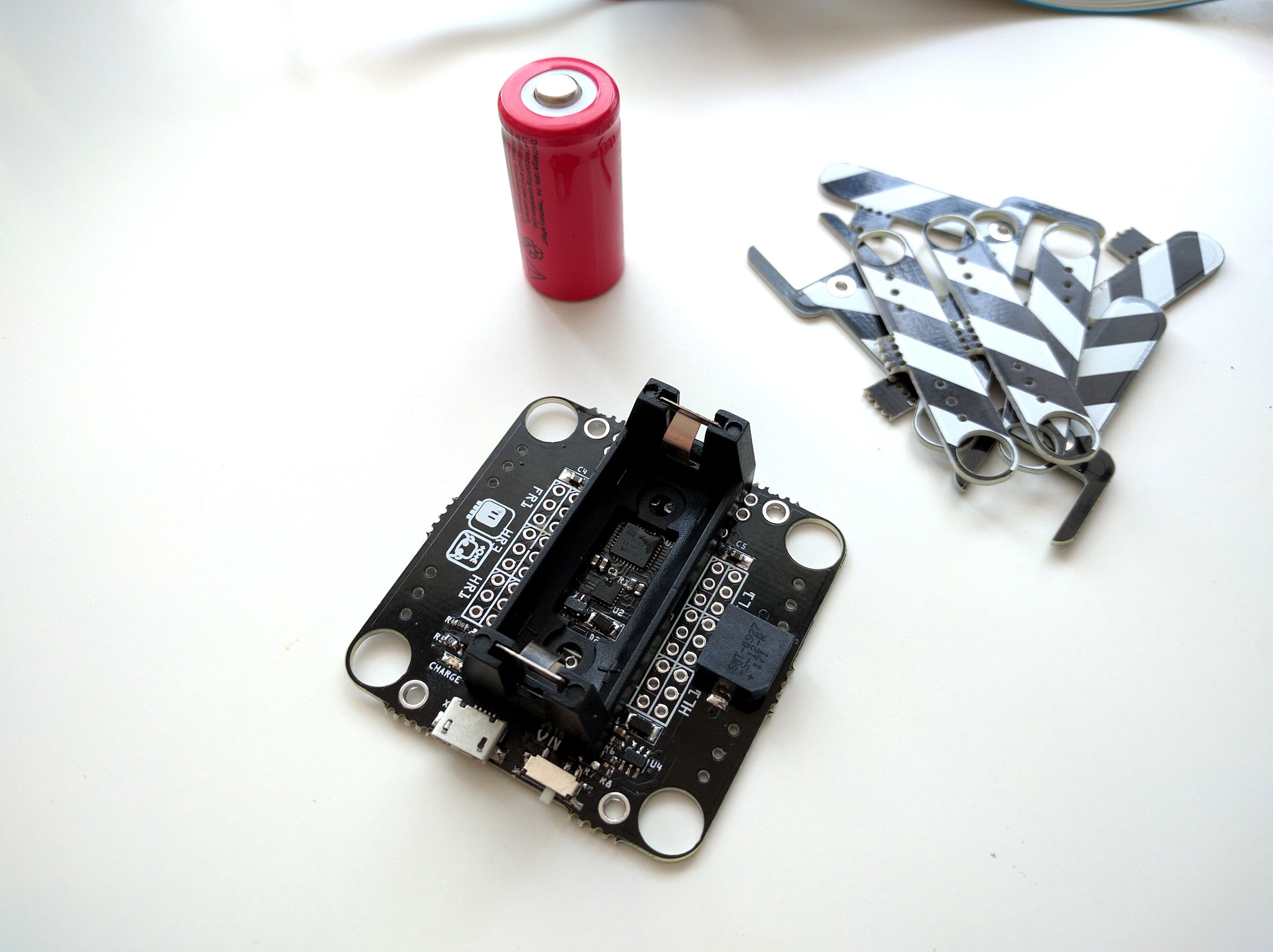
As you can see, everything fits neatly inside the hole of the battery holder, and around it. I decided to use a large, good quality speaker this time — maybe I can have it say the turret lines from Portal. Next up are the legs. Unfortunately that part still requires the use of hot glue.
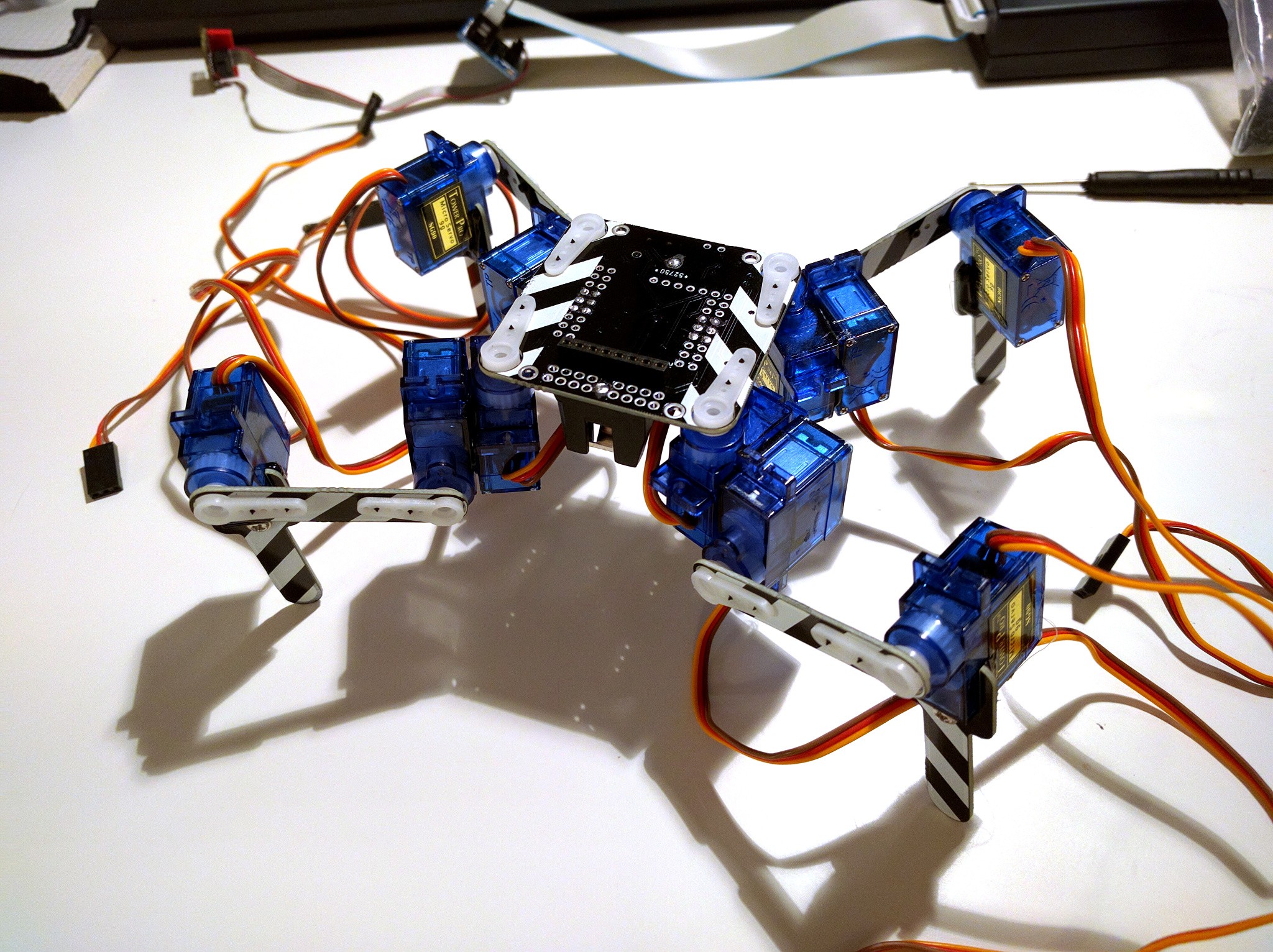
I got the first four servos connected — since I don’t want too long cables, I decided to cut them and solder them directly into the PCB, but you can as well solder male headers in there and plug the servos in. There is room for that.
I compiled a version of CircuitPython for Trinket M0 with adjusted pins, and the servos work nicely! Now I need to connect the remaining servos, and port the IK code I have to this.