Brains¶
Published on 2016-05-06 in Pony Bot.
The PCBs finally arrived, of course while I was travelling. I’m finally back, and I assembled the PCB. Of course, since they were designed in a hurry, there is a number of mistakes.
somehow I managed to swap the RST and ADC pins with TX and RX,
there is a short circuit right next to the battery connector,
I didn’t leave any room for I²C pullup resistors,
I forgot to add room for the power switch.
The short circuit was fixed with an x-acto knife. I’m not really using the RST and ADC pins, so I left them unconnected. For the serial connection, I also left the pins unconnected and soldered wires directly to the pads on the module. The power switch for now is on the battery cable, and I will see about the pullup resistors later. So I got the board working.
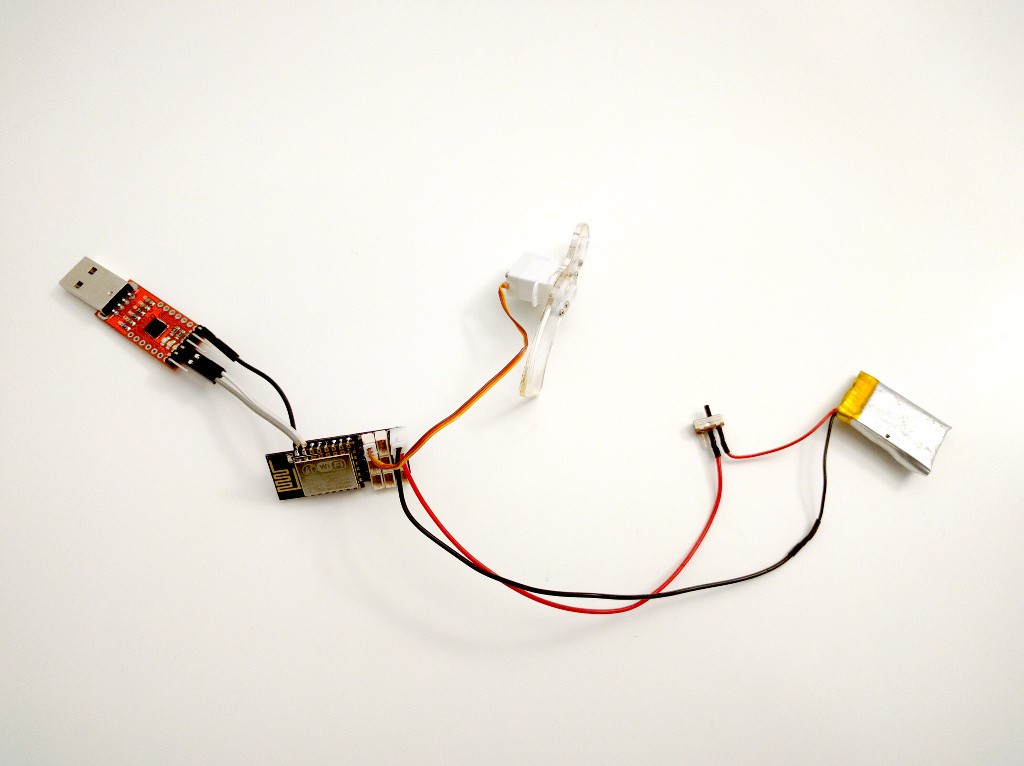
Next, I flashed Micropython on the ESP8266 and did a quick test to see if the PWM signal for the servos works on all the pins – including the ones that are pulled up or down for the board to boot in the right mode. For once it all worked great – so that’s one stone off my heart.\
Next, I’m going to make a nice servo library for the Micropython on ESP8266 (using the available PWM class, just wrapping it a bit for convenience) and see if I can get the gesture/distance sensors to work.